Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Technion Israel Institute of Technology
Technion Israel Institute of Technology

Videos
Loading the player ...
- Offer Profile
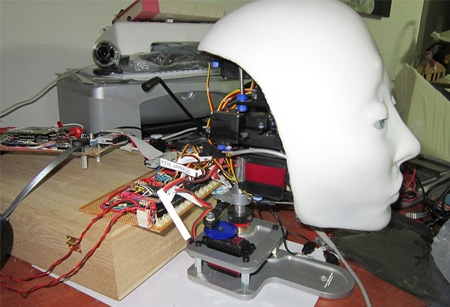
- The Robotic head project (initiated on 2011 winter semester) is intended to explore the human expressions & facial emotions controlled by the muscles it interacts with, along with computerized environment, enabling the usage of Servo motors to mimic muscles movements.
Product Portfolio
Technion's Robotic head Project - Perlins

- Hebrew translation stands for: Computer controlled
expressionable Robotic Head
The Robotic head project (initiated on 2011 winter semester) is intended to explore the human expressions & facial emotions controlled by the muscles it interacts with, along with computerized environment, enabling the usage of Servo motors to mimic muscles movemets
The Robotic head project was:
Designed and performed by: UG student, Mr. Roee hershko,
supervised by Robotic's lab cheif engineer, Mr. Kobi Kohai
The project was successfully finished at March 2012.
The following describes the project:
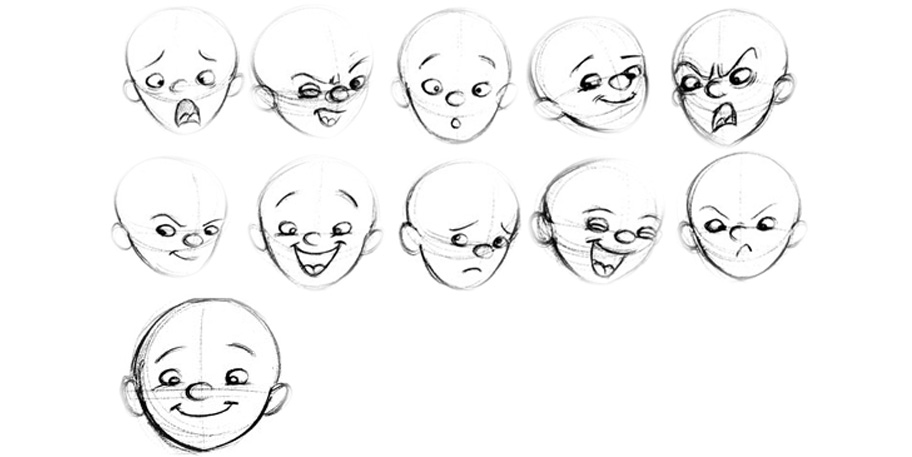
- Imagine you can control a Robotic head using 25 Servo motors throughout the head, which emotions can you conjure?
- Hebrew translation stands for: Computer controlled
expressionable Robotic Head
Robot expression
- The Head contains 25 Servo motors in the following
locations:
1. Eyebrows
2. Eyelids
3. Eyes
4. Lips
5. Mought & Jaw
6. neck
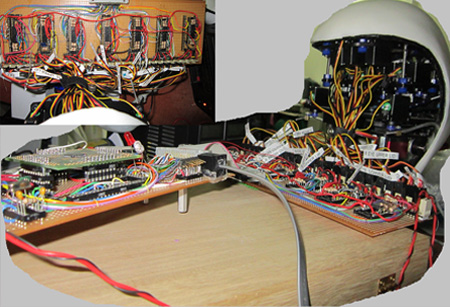
all servo engines are controlled using PWM pulses.
- In order to control the Servo motors a microController (Microchip's PIC18F6390) was used, providing the following tasks:- Communications control (in & out of the entire system).
- PWM - Angles (degrees) conversion.
- Facial expressions Algorithms.
- Timing requirements (for PWM pulse creation).
- Start-up & periodically tests (check COM, Voltages, Sanity check,
Checksum on data packets).
Here's a little academic review of other similar projects from universities around the globe:

FLOBI - beifield univ, Germany, featuring:
- 1. 18 DOF (degrees of freedom, AKA servo engines).
2. includes eye cameras
3.contains team of 6 Engineers, researchers, faculty
memebers.
4. Bulit to avoid "uncanny valley".

ICUB - Lisbon univ, Portugal, featuring:
- 1. special children interactions design.
2. 6 DOF
3. in progress since 2006 (esimated price - several
hundred K$)

WE-4RII - waseda univ, japan, featuring:
- 1. 22 facial DOF (contains more for entire body
functionality)
2. contains eye cameras, with focus controll
3. contains multi-level expressions algorithms.
4. budget set to - several hundred K$.
5. developing as joint venture with ARTIS labs in Italy.
6. contains complex mechanics.
Perlins Robot
- Featuring 25 DOF - 25 servo engines throughout the Head, enabling the
creation of a wide array of expressions.
- hardware was developed with the following specifications & insights:
- 1. Two seperate voltage regulators (one for current up to 0.5 A, for uController),(one for Servo engines, up to 7A).
- 2. External Crystal for uController accuracy (needed for PWM creations).
- 3. Opto-couplars, to buffer between low power consumption (uController), and high power consumption (Servo Engines).
- 4. conductors & wires gauge able to sustain high Current consumption.
- 5. Flash programmable 64 pin microProccessor, with 51 I\O ports (which I turned into PWM outputs, using Software).
- Featuring a very low budget (overall cost), and a task force of 1 ambitious Student (Me).
- Firmware feature multiple modules ( Test module, Manager module, Communications module, Expressions module, PWM module).
- C# interactive user friendly GUI tool, to speed up further follow-up projects & very helpful for exhibitions .
- Facial skin is an elastic poly-Silicon , Servo engines replaceable, Dimentions: 21.6 x 13.97 x 20.3 cm.
- Project was created with the Amazing help of Josh grey CEO of Customent Solutions company.
- Self designed Data packet protocol between PC & microController (62 Bytes per packet, to control 25 servo engines)
- Featuring 25 DOF - 25 servo engines throughout the Head, enabling the
creation of a wide array of expressions.