
- Offer Profile
- Welcome to the Robotics Laboratory at the University of Illinois at Chicago! Housed in Computer Science and Electrical and Computer Engineering Departments within the College of Engineering, Robotics lab is a research facility specializing in the theoretical and applied research in robotics. Its mission is to provide a multidisciplinary environment for students and researchers interested in synergy between science and engineering. Current research activities range from designing interfaces for the interaction between a human and a robot to formal methodology for safety monitoring of robot systems.
Wireless Sensor Networks

- The world’s population is aging at an ever increasing
pace. There is the need to develop technologies that will support the
independent functioning of older people so that they are able to remain
living in the community, postponing the transition to living in
institutional settings for as long as possible - a movement referred to as
aging in place. Assistive robots hold great promise in that respect.
However, one of the main obstacles to the widespread use of robotic
assistants is the lack of adequate interfaces: the elderly person should be
able to communicate with the robot naturally, similarly to the way he/she
would communicate with a human caregiver. Therefore, if the robot is to
assist with daily activities it needs to respond to all types of user input.
We hypothesize that in addition to well established modalities of
communication like language, gestures and vision, physical interaction – a
bi-directional exchange of forces during a direct or indirect (through an
object held by the robot and the user) contact – also plays an important
role and should be studied to develop an effective robotic interface. A
multimodal interface will not only make communication better, by sharing the
information between the modalities there is no need for highly accurate
interfaces for each individual modality.
Correct functioning of cyber-physical systems is of critical importance. This is more so in the case of safety critical systems such as in medical, automotive and many other applications. Since verification of correctness, in general, is infeasible and testing is not exhaustive, it is of critical importance to monitor such system during their operation and detect erroneous behaviors to be acted on.
Monitoring techniques are investigated, when the system state is not fully observable, it's behavior is stochastic and the property to be monitored is specified on the system trajectory. Theoretically, two notions called monitorability and strong monitorability are difined and the necessary and sufficient conditions characterizing them are also given. General monitoring techniques for cases when systems are modeled as stochastic hybrid automata, and the properties are specified as safety or liveness automata are presented State estimation is another key step in the monitoring, since the property is defined on system behavior which is hidden and partial observable. Rao-Blackwellised Particle Filtering is employed in this hybrid state framework.When exploring a scalar field, for example, concentration of oil spill over Mexico Gulf, by a group of sensors, it is always a question that where to deploy them over the area of interest. In general, the deployment of the sensors satisfies our demand, such as covering the whole area of interest.
In our project, we need more sensors to cover the part where the amount of information over that part is higher than others. Thus, we need an index for every point over the area of interest to quantify information density. In our research, We found that curvature is a good choice to quantify the information density of the field. By definition, curvature of a surface describes the amount by which the surface deviates from being a flat plane. At a certain point, the higher the curvature is, the more sharply the surface bends. Accordingly, the higher information density that point has. Since curvature is a function of the field, i.e., it can not be read directly from the sensors, we estimate it from the splines which approximate the field. Moreover, all sensors are mobile ones. So, a step-by-step motion algorithm should be embedded to drive them to an optimal sensing configuration, which means within each sensor's region of responsibility, the integral of the curvature, i.e., the amount of the information, should be the same.
It's easy to reach optimal deployment given there is a central server that collects sensor readings and positions of all sensor nodes. Nevertheless, We want to make our task a distributed one which is more challenging. In our problem settings, we assume that there is no central server, each sensor node decides where to move based on the information only provided by its instant neighbors.
So, there are two key problems for us. The first one is how to approximate the field by splines. Once we know the field, we may compute the curvature via the field. The second one is based on local information, where each sensor should move to achieve the global optimization deployment.
CPS: Monitoring Techniques for Safety Critical Cyber-Physical System

- CPS now is a new emerging research area that include a
wide range of related disciplines with different approaches, methods, tools
and experimental platforms. This project is looking into one of the branch
in this broad area: Monitoring.
The growing complexity of modern engineered systems,and their increased
reliance on computation, calls for novel approaches to guaranteeing their
correct functioning. This is especially important for automotive systems
where a failure can have catastrophic consequences.
One way to ensure correctness of acomplex system is to thoroughly test
and/or verify it. While testing can increase condence in a component, it can
not guarantee correctness. Verication, on the other hand, can guarantee
correctness, but it is simply not feasible, for example, for a car with
advanced engine controls and numerous networked microprocessors. In other
cases, the component might have been veried for correctness on a model which
was not accurate. And more importantly, even if acomponent is found to be
defective through verication,we may still want to use it if the incorrect
behavior only occurs rarely.
Runtime monitoring of the behavior of a component is an approach that can complement testing and verication. It can provide another layer of safety to the operation of the system. The monitor observes the inputs and outputs of the component and checks whether the behavior of the system is consistent with the expected behavior. Monitors can be especially useful if a fail-safe shut down procedures can be developed, which is true for abroad class of systems. We propose that monitor design be separate from the system design and be performed after the design of the system by a different set of designers. The fundamental advantage of monitors is that they are inprinciple easy to design and implement, and they do not fundamentally constrain the design of acomponent. Such two layer approach ensures that incorrect behaviors, due to potential faulty component designs, are detected by the monitor and are acted upon. Research focus
- The project performs research on ensuring the correct
functioning of safety critical cyber physical systems. This is achieved by
monitoring the operation of the system at run time. The problem is
challenging since the correctness property to be monitored is specified on
the evolution of system state over time which the monitor cannot directly
observe; furthermore, the evolution of the system is probabilistic. The
probabilities or randomness in the evolution of the system is due to
uncertainties introduced by noise in the sensors or due to other
unpredictable events, such as component failures, modeled probabilistically.
The inputs to the monitor are the outputs generatedby the system. These may
include some sensor outputs. By using these inputs the monitor needs to
decide whether the system execution is correct or not.
The project has so far introduced two models for specifying the semantics of such cyber physical systems. The first model is the Hidden Markov System in which the states of the system are modeled as discrete states after quantization. For such systems the property to be monitored is specified by an automaton on infinite strings. We defined two accuracy measures of a given monitor --- acceptance and rejection accuracies. The accuracies capture percentage of false alarms and missed alarms, respectively. Using these concepts we defined two notions, called strong monitorability and monitorability. We gave exact characterizations when a system is strongly monitorable and monitorable with respect to a property. Based on these notions we developed techniques for monitoring, when the system to be monitored is specified by a probabilistic Hybrid automaton and the property to be monitored is given by a deterministic hybrid automaton. We gave a monitoring method that uses product automaton and estimates probabilities using particle filters. These monitoring techniques are implemented using Matlab and have been shown to be effective on some examples
Current results
- We have so far given exact characterizations of when a system is monitorable with respect to a property and is strongly monitorable with respect to a property. For cases when a system is monitorable with respect to a property, we have developed monitoring techniques that can obtain arbitrarily high levels of accuracy close to 1. These techniques were implemented and were shown to be effective using some examples. In order to implement the monitors, we have developed estimation techniques for hybrid systems based on particle filters. Due to its highly nonlinear(the discrete jumping evolution), particle filter shows its advantage in the state estimation. Since the experimental system has several million high-dimensional hybrid states, so by using Rao-Blackwellization, it's possible to reduce the dimension while resampling is performed to get higher accuracy with less particles, also Kalman filters are used for continuous variables for a better performance.
Future work
- Based on the findings we have so far, some refined and
new ideas are to be implemented:
- Development of cost based metrics for optimizing monitors;
- Development of techniques based on Partially Observable Markov Decision Pocesses (POMDPs) to generate optimal policies for monitoring safety as well as liveness properties and investigate the effect of different reward structures on the accuracy of the monitoring;
- Investigation on monitoring technique when the property automaton is based on expected values.
Resources


- The Lab has 5 Windows workstations, 2 Linux workstations and 1 Mac machine. It is well equipped with a library of books and journals on robotics. It has separate offices for the graduate students, a conference room and a lunch room. Networking capabilities include connection to the University of Illinois network infrastructure. Other amenities include photocopier, printers, fridge, phone, etc. The lab also works in close collaboration with the Electronic Visualization Laboratory in the Department of Computer Science and Virtual Reality Laboratory in the Department of Mechanical and Industrial Engineering and has access to their resources too

- The Robotics Lab has two Unimation PUMA 560 Mark II manipulators which constitute the core of the control environment for various problems that we wish to solve. Though about twenty years old they are in good working conditions. The PUMA 560 resembles a human arm in its shape and capabilities. Each member is mechanically linked to the others and can rotate around an axis. The manipulator is endowed with six rotational degrees of freedom, which allow it to achieve complete dexterity within its workspace, that is to reach any point within the workspace with arbitrary orientation. To each motor shaft is coupled an incremental quadrature encoder, which is used to track the change in angular position of the motor shaft and allows to know the angular position of the corresponding link. The motors driving the major joints (1, 2 and 3) are equipped with electromagnetic brakes, which, once engaged, do not allow the shaft to rotate. The brakes are connected in parallel and can not be controlled individually. The brakes are released by continuously applying to them a sufficient voltage, which is experimentally set to 30 V. Conversely, they get engaged by removing such voltage. To control the brakes, solid-state relays are used, which is mounted inside the power supply cabinets. This setup fulfills the safety requirement, as the brakes are automatically engaged if the power supply is turned on , independently from the logic state of the input. We have removed from the manipulator bases the no-longer-used button which was provided to manually release the brakes in the original control environment.

- The task of the controller is to compute the motion of the system under control and to generate the corresponding control signals to be sent to the power amplifiers. The input to the controller can be either a program or a series of commands issued by the user. The controllers we selected for our system are Galil DMC-1860 Motion Controllers, which can simultaneously control the six axes of the PUMA 560 manipulators. The controllers are implemented as PCI cards and require a host PC to function. It is possible to interact with the controllers using either the DMC proprietary language from Galil or the most standard C/C++ and Visual Basic.

- The Galil ICM/AMP-19x0 Interconnection/Amplifier Module collects in a single package both the terminals to interface the controllers to the external components and the power amplifiers to drive the external actuators. The maximum number of axes a Galil ICM/AMP-19x0 can handle is 4. Thus, two of them are needed for each manipulator, namely an ICM/AMP-1940 and an ICM/AMP-1920. To minimize the effect of noise, the metallic case of the modules has been grounded by connecting the ground pin on the input connector to the metal case of the respective (grounded) power supplies. The function of the interconnections section is to break the 100-pin cables from/to the motion controller into screw-type terminals, to which all the system components (encoders, switches, outputs, etc.) can be easily connected. Each controller is actually made of two boards: one is connected to the PCI bus of the host PC, while the other is just a daughter board which provides the extra space needed by the second input/output connector. The power supplies provide the (electrical) power which is modulated by the power amplifiers prior to being delivered to the motor actuators. Our power supplies have been maintained from the previous control environment. Ours simply consisted of adding the relay which controls the motor brakes and of mounting grids to prevent any contact with the cooling fans. Each power supply provides the constant voltages of 15, 30, 45 and 60 V. We only use the 30 V, as the input to the power amplifiers and to the relay. One of the two power supplies (M2004C) also has an additional board to provide low voltages for external logic and to accept external triggering signals. We do not use it and it is thus not necessary to turn it on at startup.

- A force/torque sensor measures the forces and torques applied to it by measuring the strain induced on strain gauges. A strain gauge is basically an extensible element whose strain can be measured by means of the its physical properties. The force/torque sensors in our system are ATI Industrial Automation Gamma F/T sensors. They are connected to digital-acquisition DAQ-PCI-6034E cards from National Instruments, which must be installed in the host PC; the provided power supply module must be connected between the sensors and the acquisition cards. The cables in the foreground go to the manipulator (motors and encoders) and to the force/torque sensor. The three cables go to the host PC, respectively to the controller (light color) and to the force/torque sensor acquisition card (black). The cables on the back of the power supply are used by the brakes control and to supply the power amplifiers. The motor, encoder and brake cables go to the connector at the base of the manipulator. The (black) cable going to the force/torque sensor was fit inside the manipulator structure.

- PHANToM Premium 1.0A haptic device provides a range of motion approximating hand movement pivoting at the wrist. The device includes a passive stylus and thimble gimbal and provides 3 degrees of freedom positional sensing and 3 degrees of freedom force feedback. PHANToM haptic device connects to the PC via the parallel port (EPP) interface. Supported OS platforms include Windows 2000/XP/NT, RedHat Linux 7.2, RedHat Linux 9, RedHat Fedora, and SUSE 9.0.

- These are sensor mounted mobile robots that communicate through a distributed network. The idea is to use them for tasks such as explosives detection, locating hazardous chemical leaks and pollution sensing. Information collected from these agents can be processed with special algorithms and an accurate estimate of the location of a vapor-emitting source can be obtained. Having many mobile robots instead of one provides robustness to failures of a single agent or communication links.

- The Nomad Super Scout II is an integrated mobile robot system with an onboard industrial PC, ultrasonic and tactile sensing modules and an optional vision system. This control system performs sensor and motor control, as well as communication. At a high level, the Nomad Super Scout II is controlled by a small, industrial PC which is mounted internally. The Nomad Super Scout II can be programmed using the Linux-based Nomadic Software Development Environment. This integrated package includes a graphic interface and a fully functional simulator. The Nomad Super Scout II is an ideal mobile system for research/education in Robotics and Artificial Intelligence. The high-level processor of this system is a Pentium 200 MHz industrial PC. The high-level processor communicates to the low-level processor through a serial port. The low-level processor of this system is a Motorola MC68332. Additionally, a TMS320C14 DSP is responsible for high-bandwidth motor control at 2 KHz control rates. The Nomad Super Scout II comes standard with odometric sensors, a tactile bumper ring, 16 Polaroid ultrasonic sonar sensors and optional vision system. The tactile system uses a ribbon switch enclosed in a energy absorbing neoprene channel. The effective range of ultrasonic sensors is from 15 cm to 650 cm. The optional Color PCI vision system comes with a color PCI framegrabber and color camera with 4 mm lens.

- AIBO is targeted for the tech-savvy robotic enthusiast as
a Sony representive put it. Some of its great features include software
giving it a 75-word vocubulary and advanced photo taking options. Its
futuristic silver body is constructed with 16 degrees of freedom allowing
smooth body movement. The various sensors that the AIBO has are infrared
distance sensors, acceleration sensors, switches (head, face, legs, paws,
tail), vibration sensors, temperature sensors. Some of the latest
capabilities of the AIBO include:
1. Capturing digital images on voice commands. We have been able to navigate the environment using the LAN capability.
2. Saving images in JPEG format to the "Memory Stick".
3. Motion detection photography (AIBO Explorer AIBO-ware required).
4. Communication between AIBOs and owners.
It interacts with and responds to other AIBOs. This is what has led to RoboCup soccer games with AIBOs as players. It also expresses a wide variety of emotions (happiness, sadness, fear, dislike, surprise, anger) and instincts (play, search, hunger, sleep). It is also being used as a platform for testing various algorithms in the behavior based robotics project in the lab. It even comes with a wireless LAN capability.
Computational Approach to Dynamical Bipedal Walking
- Investigators: Guobiao Song and Miloš Žefran
The goal of this research project is to establish a general framework and a pure computational implementation for stabilization of periodic orbits for hybrid systems with impact effects. Especially, this is applied to bipedal walking. We perform the robust controller design for two- and three-dimensional underactuated biped robots. We demonstrate that dynamics of the hybrid system along a periodic orbit can be decomposed into the transverse and tangential components for hybrid systems. The robust control synthesis problem of the resulting periodic transverse linearization can be cast as a semidefinite program (SDP) and thus efficiently solved by means of Linear Matrix Inequality (LMI).
Past research topics in this area include:- research in the robust Lyapunov stability theory for hybrid systems
- development of Matlab and Mathematica tools for robust control synthesis for a class of hybrid systems based on LMI
- development of a computational optimizing approach in generating energy efficient walking gaits for underactuated dynamical bipedal walking
- design and implementation of a novel control approach based on these theories and tools
Support: NSF grant IIS-0093581 and UIC Campus Research Board
Application of Hybrid Optimal Control to Multi-vehicle Path Planning

- Investigators: Shangming Wei and Miloš Žefran
The project studies the path planning problem of a system consisting of multiple autonomous vehicles. The basic problem formulation is to move the vehicles from some initial states to some final states, while at the same time avoiding each other and the obstacles in the environment. The goal is to find energy-optimal paths for these vehicles. We have converted it into a hybrid optimal control problem and are trying to find fast and effective approaches to numerically solve the problem. Some developed techniques have been successfully applied in examples of some types of wheeled mobile robots (for example, unicycle and Hilare robot).
Support: NSF grant IIS-0093581 and UIC Campus Research Board
- Investigators: Shangming Wei and Miloš Žefran
Localizing Vapor-Emitting Sources Using a Distributed Mobile Sensing Network
- Investigators: Panos Tzanos and Miloš Žefran
Research project deals with localizing vapor-emitting sources using distributed mobile sensing networks. This entails developing a physical model of the vapor concentration, a motion control algorithm for the sensors, and a coordination algorithm to coordinate the motions of the sensors (see details).
Support: NSF grant CCR-0330342
Distributed Switching Algorithms for Robotic Networks
- Investigators: Carlos Caicedo Núñez and Miloš Žefran
The focus of this research project lies in robotic networks. In particular, we are interested in studying how can we solve global problems in a network when the robots only have access to local pieces of information. By sharing information with its neighbors, each robot can learn more about the environment, and can adjust its behavior as the information it is gathering gets more complete. Now, when there is more than one task that has to be addressed by the network, the local information must suffice for each agent to take the best possible decision, so it would not compromise in the long-term either of the objectives of the system.
Support: NSF grants IIS-0093581 and CCR-0330342
Improving the Realism of Haptic Interaction for Teaching of Sensorimotor Skills
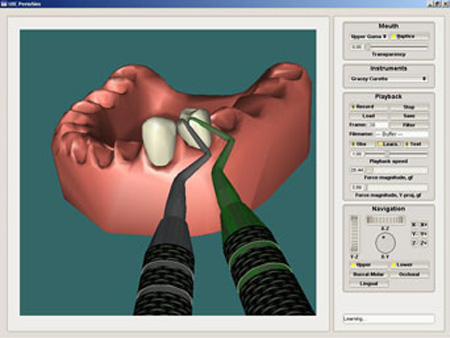
- Investigators: Maxim Kolesnikov and Miloš Žefran
Recently, haptic simulators have shown great potential in teaching sensorimotor skills. This is especially true for areas where the traditional training technique is expensive, such as medical and dental training. The goal of this work is to address several key areas where improvement is needed to increase the realism of haptic interaction for teaching of sensorimotor skills. These key areas are haptic rendering algorithms, haptically augmented training video aids and collaborative haptic environments.
Support: NSF grant CMS-0600658 and UIC College of Dentistry
- Investigators: Maxim Kolesnikov and Miloš Žefran