- ROBOTICS 21XX
- ROBOTICS 21XX is the online show of manufacturers of industrial robots

- Technologies for the new generation information infrastructures based on Computer Vision, Robotics and Artificial Intelligence

- Embodied life-like artificial systems, humanoids, biological artificial systems, man-machine interaction, imitation learning


- Foster intelligence in all its facets by promoting excellence in basic research, education, and society at large.


- Developing the principles, techniques, and technologies for personal robots

- Our research interests are in the area of Robot Locomotion and Manipulation, Kinematics and Mechanisms, and Autonomous Systems.

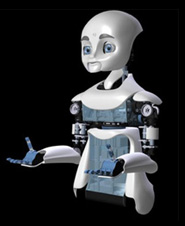
- ROBO GARAGE creates, designs, and invents unique and original humanoids for Exhibitions and even TV commercials...

- Our research focuses on the interfaces between robots and biological systems.


- The Active Vision Group advances knowledge in computational vision in the areas of detection and tracking of moving objects...

- Object, Activity and Interaction Recognition, Human-Robot Interaction, Machine Perception and Learning

- mechatronic design of robotic and automation systems, fault tolerance to mechanical systems, fault-tolerant design...


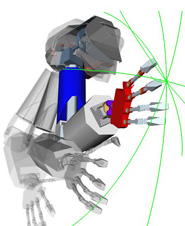
- The main focus is on the study of humanoid robots and articulated robotic hands.


- Our research ranges from mechanical principles to novel fabrication techniques to system integration of autonomous millirobots.

- Centre for Robotics and Intelligent Systems -
School of Computing, Communications and Electronics

- Interaction, tele-operation, learning by example, emotion technology, advance image processing, Robot Interface to Cyberspace

- Researchers working at AIRLab have always followed and leaded the evolution of AI and Robotics.


- Fundamental research in robotics, vision, perception, control, automation and learning


- Mech-Mind Robotics is a leading specialist in AI + 3D vision solutions for automation & 3D cameras.

- doing research on all types of autonomous mobile robots, including intelligent driving and walking robots, AUVs, and UAVs


- 3D models, Object recognition. Human-computer interfaces. Visual tracking and localisation. Visually guided robotics.

- The Computational Learning & Motor Control Lab
Research in the areas of neural computation for sensorimotor control and learning.


- The CIRG - Cybernetic intelligence is the study of intelligence and its application.

- CVRL is a research facility specializing in the theoretical and applied research in computer vision and robotics.


- strives to realize robots and autonomous systems that are effective collaborators for pursuing human endeavors


- LRP studies experimental platforms include sensor networks, mobile manipulators, and integrated bimanual humanoids.


- Autonomous service & social robots, human-robot interaction, cognitive architectures, neurorobotic & motor neuroprosthetic systems

- Our objective is to research into the foundations, representations and applications of intelligent systems


- SRL is dedicated in research and development in making social robots ubiquitous parts of our day to day lives.

- Artificial Vision, Intelligent Systems, Sensor Data Fusion, Pattern Recognition

- RoboLab conducts research in Autonomous Robots, Social Robotics and Computer Vision

- Intelligent robots (construction, control and training) and artificial intelligence.
- The Robot Autonomy and Interactive Learning research group focuses on the development of interactive robotic and software systems

- Personal Robotics Lab researches fundamental problems in robotics, in order to enable personal robots to perform challenging tasks


- We provide robotic vision and intelligence. Based on a patented 3D technology, we developed the worlds highest-resolution and highest-accuracy 3D camera, for powerful, reliable, and fast machine learning and also reducing the training and deployment time.

- ASL, a laboratory consisting of the Center of Product Design / ETH Zurich and the Autonomous System Lab / ETH Lausanne.

- Looking at self-organization and evolutionary phenomena. Modular Robotics and Self Assembly...


- Developing Albots providing significant insights into how humans and animals compute representations of their spatial environments


- Research conducted at the Lab is divided into three areas: Automated Surveillance, Augmented Reality, Robotics

- specialized on telerobotics and models and algorithms for controlling the motion of robots using geometrical sensors

- Design and development of intelligent mobile robots - self-guided vehicles.


- Mobile Multirobot Systems, Mobile Robots, Underwater Robotics...


- Investigating machine intelligence based on mechanics and its related technologies


- Development of theoretical and technological solutions on the particular area of autonomous systems

- Our main research interest in AI is understanding how we can best create complete intelligent agents.


- Analog Computation, Choreography of Dynamical Systems, Control of Quantum Systems, Pattern Generation, Robotic Manipulation


- The SAUVIM project is about a Semi-Autonomous Underwater Vehicle for Intervention Missions


- Computer Graphics, Computer Vision, Robotics, Sensor Networks

- The world's first Arabic-speaking Humanoid Robot and Facebots - Robots entering in relationship with humans via Facebook


- Our pupose is to develop a high-speed and high-performance robot system beyond human.


- We apply artificial intelligence methods to various types of real robots: mobile robots, manipulating robots, and humanoid robots

- Drawing Robot, Mechancial Rider, Talking Robot, Spherical Motor, Compressive Sampling

- My research group persues a model-driven approach to explore visual perception and cognition.


- The URI Mechatronics Laboratory


- The research activity focuses mainly on the perceptual inference processes a cognitive robotics system should be able to activate


- Opto offers various compact imaging modules for system integrators and machine manufacturers. The high-resolution optical-illumination-camera-electronic solutions are ideal for use in measuring machines, testing devices, roundness testing machines or directly in the production line.

- e-con Systems is a pioneer in OEM Cameras and Computer-on-Module products. Cameras include standalone MIPI camera modules, USB cameras and stereo cameras. System on Modules include SOMs based on NXP, Texas Instruments & NVIDIA ARM processors.

- The humanoid robot developed as part of the EU project RobotCub and subsequently adopted by more than 20 laboratories worldwide
- Adaptive Learning Image and Signal Analysis: Image processing, detection and classification of structures and objects in images.

- Robotics and neuroscience research implementing models of cognition in robots of humanoid shape