University of Bremen

Videos
Loading the player ...
- Offer Profile
- The DFKI Robotics Innovation
Center is a young, dynamically growing company with international character
and, currently, a staff of more than 110 employees from all over the world,
just under 100 of them working in research and development. More than 80
student assistants are supporting the individual projects.
The Robotics Innovation Center team benefits from interdisciplinary cooperation: computer scientists and design engineers meet biologists, mathematicians, computer linguists, industrial designers, electro engineers, physicists, and psychologists in order to jointly develop mobile robot systems.
Product Portfolio
iStruct Demonstrator

Technical Details
Size: 66cm x 43cm x 75cm (standard position) Weight: 18 Kg Power supply: 44,4V / 2.5Ah (Lithium Polymer) Actuation/ Engine: 8 * 48V RoboDrive motors with a 1:50 HarmonicDrive gear, 8 * 48V RoboDrive motors with a 1:80 HarmonicDrive gear, 4 BLDC Faulhaber-2250 motors as well as 6 BLDC Faulhaber 2444 Motors Sensors: Joints: Positions (absolute and relative), speed, current, supply voltage, temperature; Foot: 49 pressure sensors, a three axis acceleration sensor, one distance sensor, three absolute position sensors, one temperature sensor, and one 6DoF force-torque sensor; Spine: 2x6 Positions sensors (absolute and relative), 6x1DoF force sensors; Body: Inertial Measurement Unit, battery voltage
System description
- One key benefit of
legged robots is their ability to act on the environment by applying forces
in a noncontiguous way in innumerous directions and magnitudes within their
designed workspace. Most multi-legged robots are equipped with
single-point-contact feet for the sake of simplicity in design and control.
This project focuses on a sophisticated lower limb system for a multi-legged robot to demonstrate the advantages of actuated multi-point-contact feet. The employed sensors include the pressure sensor array of 43 individual FSR-sensors, six additional FSR-sensors are located on exposed parts used for collision detection, a 6-axis Force/Torque-sensor, a distance sensor in the heel to anticipate the heel strike, a digital 3-axis accelerometer to perceive the orientation of the foot structure, two temperature sensors to compensate for the temperature influences in the involved electronics, and digital magnetic angular encoders to monitor every moving axes of the foot and ankle structure.
In addition, to increase the mobility towards a so-called multi-locomotion system, the rigid connection between the front and rear body will be replaced by an actuated spinal column. The mechanism is a 6-DoF parallel kinematic mechanism. The struts in the spine are arranged in such a way that only compression and tension forces occur. Hence, a single axis load cell can be integrated in line with each strut. Due to the embedded electronic in the spine the overall structure can be used as a 6-axes force-torque sensor. 
- Actuation mechanism and rods within the spine

- CAD sketch of the spine in the context of the currently developed ape-like demonstrator

- Bioinspired functionality - Developmental steps of the lower leg design
Space Robotics
- The research area Space Robotics deals with the
development of intelligent robots for extraterrestrial exploration focusing
on:
- Development of robot systems for unstructured, uneven terrain based on biologically inspired innovative locomotion concepts
- Development of multi-functional robot teams usable for different tasks ranging from in-situ examinations to the organisation and maintenance of infrastructure
- Reconfigurable systems for planetary exploration
- AI-based methods for autonomous navigation and mission planning in unknown terrain
- Image evaluation, object recognition and terrain modelling
- AI-based support systems for scientific experiments

AMOR
- The aim of the project is an evaluation of concepts of robotic mining techniques to be applied in a future Regolith conveyor system, supporting current activities within the ERA-Star project AMOR. In the far future, not before 2025, the extraction of resources on the moon, e.g. in order to supply fuel for space vehicles, will be one essential goal of space exploration. Here, a cost-efficient and reliable mining technique for the collection of the regolith plays an important role. This project will help to select suitable components for this as well as for a suitable EDF (Earth Demonstration Facility).
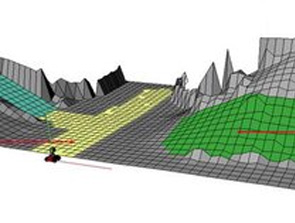
ARAMIES
- The goal of the ARAMIES project is to develop and program a multifunctional, multi-degree of freedom, autonomous walking-robot for rough terrain. In particular, the project is focused on very steep and uneven terrain, e.g., canyon or crater walls.
Expl.Lun.Krater
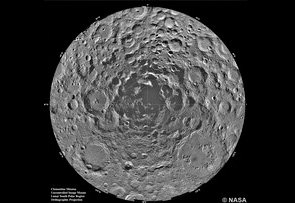
- In this study, a feasibility analysis was carried out concerning a rover- or crawler-based exploration of deep lunar craters at the moon poles. In this connection, current experience of previous missions as well as the latest state of the art regarding the development of planetary rovers were taken up. With the aid of a reference crater model, two reference systems (wheeled and legged) were compared with each other. Furthermore, the demands on these subsystems were defined and then specified in order to estimate mass, energy consumption, and volume of those systems that may be used in these craters.

Lunares
- The aim of this project (funded by the DLR and BIG Bremen) is the evaluation of state-of-the-art robot technologies for future cooperative, heterogeneous, extraterrestrial missions with reconfigurable robots. In cooperation with our partners, a reconfigurable robot system consisting of a Lander (OHB) with manipulator, a Rover (EADS Astrium), and a climbing robot (DFKI) will be developed based on already existing robot systems. Its versatility and robustness will be tested and demonstrated in a replication of a crater exploration scenario.

SCORPION
- The SCORPION is an eight-legged walking robot for
hazardous outdoor-terrain. It uses a biomimetic control concept which allows
a very flexible, robust walking behaviour in various terrains. The walking
gaits of the SCORPION robot are based on research on walking patterns of
real scorpions.
The SCORPION can be controlled in an intuitive way with an HMD, an optional voice control, and a data glove. Possible future fields of application include exploration of hazardous environments, e.g. in extraterrestial or SAR missions.

SpaceClimber
- The goal of the "SpaceClimber" project is the development of a biologically inspired, energy-efficient and adaptively free-climbing robot for steep slopes. This project builds on the experience of the ARAMIES project (DLR Grant No. 50JR0561 & ESA Contract No. 18116/04/NL/PA)and the SCORPION project (DARPA Grant No. N0014-99-1-0483 & NASA-USRA Grant No. 8008-003-002-01). SpaceClimber should prove that walking robotic systems present a solution for future missions on difficult terrain, in particular missions in craters or rock fissures. The robotic system that we intend to develop should be able to conquer irregular slopes of up to 80% and should be in a position to navigate with local autonomy using built-in sensors.
SPACE ROBOTICS: Robotsystems

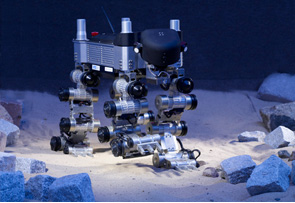
ARAMIES - A four-legged robot
- The ARAMIES robot comprises 26 active joints, 6 in each
leg and 2 for actuating the head, which includes a camera, a laser scanner
and two ultrasound distance sensors. In addition, the system has
acceleration sensors and gyroscopes for stability control. Furthermore, each
joint is equipped with absolute position sensors, current sensors, and
temperature sensors.
One major advantage of the ARAMIES robot in comparison to other walking robots is its actuated claw which is used to get hold in steep inclinations. In laboratory tests the system was able to climb up a rung wall with a inclination of 70°.

SCARABEUS - A six-legged robot
- The SCARABAEUS was built based on the experience gained
in the experiments from the SCORPION and ARAMIES projects. The SCARABAEUS
joints were developed in the ARAMIES project, featuring a continuous torque
of 13 Nm (26 in peaks). They are controlled by 4 different board types
similar to those used to control the ARAMIES robot.
The low-level software is based on bio-inspired locomotion control concepts. It features Bezier Curve-based rhythmic trajectories whose output is similar to the output of Central Pattern Generators (CPG). Additional reflex models ensure robust locomotion in hazardous terrain. The rhythmic patterns may directly define joint angles as well as Cartesian coordinates for the foot using an inverse kinematics layer developed for SCARABAEUS. The bio-inspired mechanisms are capable of controlling 18 joints and 6 claws with a Microcontroller.
One focus is the development of high-level artificial intelligence which allows the SCARABAEUS to detect obstacles and to navigate around them, especially in rocky slopes with up to 80% inclination. Due to the extreme environment, most planning and navigation solutions were not applicable. In natural environments, self-localization and path planning are much more challenging than indoors, e.g. offices with flat floor and structured surroundings.

SCORPION - A eight-legged robot
- The eight-legged walking robot SCORPION was developed for
an application on unstructured, uneven terrain. Using a biomimetic control
concept which allows high mobility and a very flexible, robust walking
behaviour, it has already been successfully tested in various rough terrain.
Possible applications in future extraterrestrial missions are evaluated,
especially, using this robot concept for crater exploration.
Legged systems are of great interest to the field of robotics. Due to a large number of degrees of freedom they are able to adapt autonomously to a multitude of different terrains and obstacles.
In principle, due to their legs they have huge advantages in comparison to wheeled or tracked robots on rough terrain as well as on steep terrain.
To program the SCORPION a bio-inspired approach was developed. Simplified models of central pattern generators and reflex models are implemented in the SCORPION software. Evidence of both of these biological mechanisms can be found in almost all legged living beings as elementary neuronal controls. Furthermore, the walking gaits of the SCORPION are based on walking patterns of real scorpions.
This approach allows a very adaptive and robust control, thus presenting a very efficient and low-power solution to the problem of controlling simultaneously all of the 24 coupled joints of the SCORPION.
Underwater Robotics
- This area deals with the development and realization
of Artificial Intelligence methods in underwater systems. Main points of
research are:
- Development of systems for user support in remote-controlled underwater vehicles employing virtual immersion methods
- Design of methods for autonomous manipulation and mission planning of robot arms in underwater applications, particularly with state-of-the-art sensor technology, such as "Visual Servoing"
- Image evaluation and object recognition with modular and intelligent underwater cameras
- Design of control methods for next-generation autonomous underwater vehicles
- Development of biologically inspired and energy-efficient methods of transport for underwater vehicles, such as oscillating systems
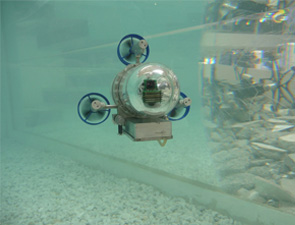
µAUV²
- Based on the experience gained with the construction and operation of the first version of the µAUV, this project aims at developing a next-generation µAUV, a novel, robust, and powerful µAUV². As far as possible, problems regarding density, computing capacity, and thrust should be eliminated by then
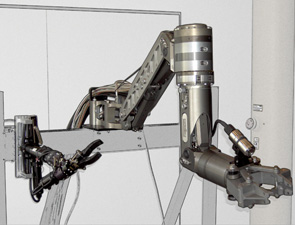
CManipulator
- The CManipulator-Project deals with the development, the evaluation, and the construction of the first autonomous dual manipulator system for inspection and service tasks. In this project, methods for visual detection of underwater objects and for autonomous manipulator control will be developed. It is planned to use this system for future underwater inspection and maintenance tasks which include autonomous picking, placing, and plugging.

Underwatersnake V3
- The aim of the project is the development of a next-generation underwater snake, focussing on construction, production, and test of the propulsion components of the robot's spinal column. Above all, the underwater snake is a swimming system, i.e., during operation, the robot remains close to the surface while, if required, it may dive up to a depth of 3 m. As compared to customary water propellers, the turbulence of the system is significantly reduced due to an undulation propulsion. Thus it is possible to use this robot in bodies of water with strong plant growth or near sensitive devices or edifices.

VI-Bot
- VI-Bot integrates approaches from the areas of robotics, neurosciences and human-machine interaction into an innovative system designed for remote control of robotic systems. A novel exoskeleton with integrated passive safety, using adaptive and behaviour-predicting operator monitoring by means of online EEG analysis, and comprehensive virtual immersion and situational presentation of information and operational options, will convey an 'on site-feeling' to the telemanipulating operator.

µAUV
- Exploration of the world's oceans and the ocean floor has barely scratched the surface. One explanation for this are the harsh conditions encountered by scientific instruments when deployed into the depths of the sea. The extreme pressures, the total darkness, the need to communicate via broad band (possible only over cable), and the high logistical costs all complicate the deep-sea use of technical systems.

ROV-Hovering
- State-of-the-art sensor technology merged with sonar and inertial system's data are employed to develop a system allowing the autonomous hovering of an ROV in front of a structure. It will be used to support ROV pilots during handling tasks in that it enables them to position and hover an ROV in relation to an object or a structure.
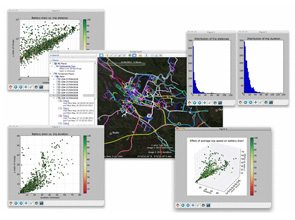
Electric Mobility
- In the field of electric mobility we are testing
concepts for electric vehicles, battery charge technologies, and the
collection of vehicle data. We are creating models for intelligent,
environmentally sound, and integrated urban mobility. Our research focuses
around:
- Development and demonstration of innovative vehicle concepts
- Design of new approaches to mobility and traffic control, application support, technology integration
- Data collection by fleet tests with technologically different electric vehicles
- Coordination of the regional project office of the model region Electric Mobility Bremen/Oldenburg
- Virtualization of the model region, simulation of future, larger vehicle fleets, and predictions of the effects on the model region in terms of traffic volume, infrastructure needs, environmental pollution, and economic efficiency
- Creating a foundation for new business models and traffic concepts on the basis of the data previously collected

New Mobility in Rural Regions
(Ongoing Project)- Modern society and economic prosperity are characterized
by mobility and traffic. For the rural areas in and around Bremen/Oldenburg
both have always been of utmost importance, even more so since mobility
plays a crucial role in economic growth and employment. The aim of the
project is furthering electric mobility in the region Bremen/Oldenburg,
focusing on three main issues:
1. Applied electric mobility
2. Technological concepts
3. Mobility effects
Workpackage 2.1 ICT
(Ongoing Project)- The aim is to demonstrate an ICT service landscape in
electric mobility. An IT platform offers tools and methods to increase
electric mobility and its application areas and to familiarize users with
these new ways of mobility.
Data are analyzed based on the E-mobility data base. These prepared data are the input for a number of possible tools and instruments.

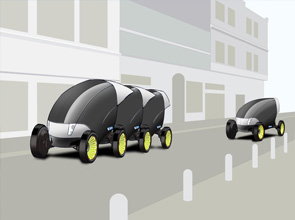
Workpackage 2.2 ITEM
(Ongoing Project)- The aim of the subproject ITEM – Innovative Technologies Electromobility – is the further development, design, and construction of an electric vehicle as technology demonstrator of the future. Apart from a changeable morphology, this vehicle also allows autonomous actions, such as automatic parking and automatic docking at charging stations. RoadTrains can be set up by docking the vehicles to each other, thus improving the range of all drivers. Sensors in and on the vehicle offer complete navigation systems including intelligent route planning, depending on the destination, the state of charge of the battery, and the traffic, among others.

Model Region Electric Mobility PMC: Module 3
- The aim of the project is to obtain through daily use of the electric vehicles reliable information as to user experience, technical performance parameters, and practical suitability in different application scenarios.
Model Region Electric Mobility PMC: Module 3
- The aim of the project is to demonstrate the suitability of electric vehicles for daily use in a private environment. It is extended by the field “Electric Mobility: Experiences, recommendations for action, and concepts” as well as preparatory activities for the design of a Living-Lab “Electric Mobility”.
Model region Electric Mobility PMC: Modul 2
- The project Intelligent Integration Electric Mobility includes the acquisition, management, and evaluation of data from fleet tests, user experience, and secondary sources collected in the context of electric mobility projects. The development of different instruments for the interpretation and visualization of this data base is also part of the project.
Search and Rescue Robotics (SAR), Security Robotics
- In this area, robots will be developed to support
rescue and security personnel. Main points of our research are:
- Development of highly mobile platforms for indoor and outdoor applications
- Development of autonomous systems that are able to identify potential victims (SAR) or intruders (Security)
- Development and application of state-of-the-art sensor technology based on radar, laser scanner, and thermal vision to identify objects and persons, resp.
- Embedding of robot systems into existing rescue and security infrastructures
- Autonomous navigation and mission planning

CARLTON
- The aim of the project is the implementation of a sensor module which is capable of covering position, speed, and orientation in a location over a certain period of time. The module consists of acceleration sensors, gyro sensors, and magnetometers, each of which is operating in all three degrees of freedom. In addition, an imaging sensor is employed which is directed at any structured plane surface. With the aid of optical flow methods, the generated image sequences will be processed, thus extracting a description of the sensor movement in relation to the plane surface. Combining the individual sensor data through sensor fusion techniques, a complete description of the condition will be achieved.

SentryBot
- The DFKI-Lab Bremen is developing a team of autonomous
mobile security robots which can be seamlessly integrated into existing
security systems. Those mobile security robots are able to navigate
autonomously and are energy-independent, since they are able to recharge
their batteries without any user interference. The robot team is
self-organizing and will provide an intuitive interface via voice control in
the future.

SentryBot II
- Based on an autonomous security robot developed at the DFKI, a cooperating robot system will be built. The prototype of the existing SentryBot is equipped with motion detectors based on radar and infrared, as well as with a camera. Currently, four such robots equipped with recharging units are being constructed for the surveillance of the Bremen Robotics Lab. Based on experience gained with our SentryBot study, a larger model has been developed which may be used outdoors and in areas which are more difficult to get to (i.e. staircases) and which features an infrared camera as well as a zoom camera.
Cognitive Robotics
- Our research deals with the development of intelligent
agents which learn through interaction with the surroundings and are capable
of collecting information about their environment and of independently
identifying options for acting. Main points of our research are:
- Development of adaptable, robust learning architectures
- Integration of intelligent materials
- Representation of senso-motorical information
- Alternative morphologies and mobility concepts
- Application of biologically inspired concepts for
- Developing the morphology of robots and their learning algorithms
- Steering and control algorithms
- Development of new concepts for human-robot-interaction through investigation and development, resp., of common communication paths
- Self-evaluation in technical systems
- Scaling decision-theoretical planning procedures to heterogeneous multi-robot systems
- Deal with continuous, restricted resources in a multi-robot framework
- Decision-theoretical planning frameworks
- Adaption of biological control concepts for the development of fail-safe, redundant and energy-efficient control

Labyrinth 1
- The "Labyrinth 1"-Project uses an altered BRIO labyrinth
to investigate by means of
EEG and fMRI examinations brain processes that occur during learning and
relearning. On the other hand, an artificial agent is supposed to be able to
play this game. Currently, this game may be controlled by hand, directly via
motors, or via motors and joystick. The integration of a number of sensors
(potentiometers, piezo sensors, cameras, and switches) makes it possible to
record the behaviour of the player as well as that of the artificial agent
and to compare these with each other. In addition, a physical simulation was
written in order to simulate the playing and learning behaviour of the
artificial agent.

Labyrinth 2
- A BRIO labyrinth game was equipped with two servo motors
and two potentiometers that allow for the remote control and measurement of
the orientation of the game’s board.
The board is mounted on a platform, and a camera is placed above this platform which allows the current position of the ball on the board to be estimated. For this purpose, a vision algorithm hasbeen developed which segments the ball in the camera image and maps the position of the ball inthe image onto a position in the labyrinth coordinate system. The mapping is calibrated automatically at the begining of each session using landmarks. Furthermore, a ball depot is currently beingdeveloped that will be mounted on the game and will allow more than one session to be playedwithout having to put the ball back manually.

LittleApe
- The goal of the LittleApe project is to build and program
an ape-like robot, which should be able to climb, alongside the walking.
The lightweight robot will be used to study various issues regarding to morphology and locomotion.
In the LittleApe project, the control software will be developed and tested in parallel in a simulation environment and on the real system.
As a result of the project we expect experience on locomotion strategies and control with a system, that is able to walk with different patterns, has the ability to climb and can change the gait from a four-legged walking pattern to a bipedal walking gait.
SFB A3
- The Multibot project deals with the exploration of outdoor areas with teams of heterogeneous robots. Besides the coordination, the main goal ist to exploit the different features of the systems in such a manner that they lead to a richer representation of the environment compared to the use of teams of homogeneous robots. For example, a legged robot can gather additional information about the substrate it is walking on.

SFB TR8(A6)-[ReactiveSpace]
- The SFB/TR8-[ReactiveSpace] project is concerned with the development of a hybrid learning architecture for spatial cognition based on the principles of embodied cognition. The architecture will be used in order to gain a fundamental understanding of higher levels of cognition, communication, and interaction with other agents. Moreover, the project seeks to experimentally determine the importance of proprioceptive and exteroceptive information in recognizing, classifying, and representing the environment in which the agent lives and operates. For achieving the goals of the project, we will use our complex legged robot, which possesses a rich repertoire of sensor and motor abilities.

Capio
(Ongoing Project)- Capio develops a universal, wearable, lightweight upper-body dual-arm exoskeleton, primarily targeted at teleoperation tasks. A study concerning robotic rehabilitation will establish a basis for research activities in this area. Sensor information of the remote systems will be applied directly to the operator's body in real time through a feedback mechanism that relies on the actuated system.