
- Offer Profile
- We conduct research projects in the two fields of Product Design and Autonomous Systems. To learn more about our projects you can either access the individual project description through the alphabetic lists of current and finished projects or have a look at the two project lists sorted by research themes.
Research
- Our mission and dedication is to create robots and
intelligent systems that are able to autonomously operate in complex and
diverse environments. We are interested in the mechatronic design and
control of systems that autonomously adapt to different situations and cope
with our uncertain and dynamic daily environment. We are fascinated by novel
robot concepts that are best adapted for acting on the ground, in the air
and in the water. We are furthermore keen to give them the intelligence to
autonomously navigate in challenging environments. This includes novel
methods and tools for perception, abstraction, mapping and path planning.
Flying Robots

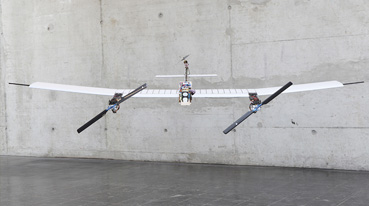
senseSoar Solar UAV
- The project senseSoar of the Autonomous Systems Lab at
ETH Zurich aims at the design and autonomous operation of a small solar
airplane. Whilst unmanned aircraft are already successfully applied in the
defense sector, this project targets strictly non-military applications.
At a size of only 3 meters wingspan, the airplane is easy to deploy and may be operated close to the ground. We target high autonomy in the sense of flight time but also with respect to user interaction. Three application scenarios are given in the following that underline the potential of small autonomous endurance airplanes

atlantiksolar Solar Powered UAV
- A UAV for the first-ever autonomous solar-powered
crossing of the Atlantic Ocean
AtlantikSolar is a project of the aerial vehicles group at the Autonomous Systems Lab (ASL) of ETH Zurich.
With the extreme showcase of an Atlantic Crossing, AtlantikSolar aims to promote the advantage of today's solar powered Unmanned Aerial Vehicles. Solar-UAVs such as the Autonomous Systems Lab's (ASL) SkySailor have already demonstrated flights lasting more than one full day, and the UAV behind AtlantikSolar is an advancement enabling even longer flight durations of up to 10 days.
PacFlyer UAV VTOL Glider
- A highly efficient uav vtol glider with flexible payload
capabilites developed by a student team at ETH Zurich.
We have a vision of a world where small aerial robots help people. Our application szenarios are limited to civilian applications only. In the pursuit of this goal, a team of eight students developed an aircraft during a so called focus project at ETH Zurich. The project is a pure teaching and not a research project taking place during the academic year 2012/13. The team consists of six mechanical engineers from ETH and two electrical engineers from ZHAW Winterthur. The project will be completed with the presentation of a technology demonstrating prototype to the puplic at the 28th of May at ETH main building. We hope, you are as enthusiastic about this future as much as we are!

Alcedo - The Flying Avalanche Rescuer (completed)
- lcedo is a student project at ETH Zurich. Its goal is to
develop a flying drone that supports the rescue of avalanche victims by
autonomously searching and marking their position.
From September 2009 until Juni 2010 the drone was developed and a prototyp was build.

Reely - The Flying Reel (completed)
- Seven students engineering a flying film reel
Reely is a student project at the Autonomous Systems Lab (ETH Zurich) aiming to develop a flying film reel for entertainment purposes. Reely is not just a fancy helicopter, it can also show movies on its film frames.
Our goal is to develop a flying entertainment robot based on quadrotor technology. The robot is designed as a flying film reel given the ability to show movies on small OLED displays arranged around the reel. Once a trajectory is defined, the robot should fly its way autonomously and afterwards find back to the docking station for recharching. You can find more details about reely and our progress in the yellow section.
Reely is realized within the scope of the focus project. This is a project based lecture provided by the Autonomous Systems Lab during the 5th and 6th semester of the mechanical engineering course at ETH Zurich. The focus project provides an opportunity for us students to turn our theoretical knowledge into practice by designing, developing and constructing a real product.

Sky-Sailor Mini Solar Airplane (completed)
- The goal of this project is to design and build a solar
powered micro airplane for autonomous exploration. This system, named
Sky-Sailor, is fully autonomous in navigation and power generation. Equipped
with solar cells covering its wing, it retrieves energy from the sun in
order to supply power to the propulsion system and the control electronics,
and charge the battery with the surplus of energy. During the night, the
only energy available comes from the battery, which discharges slowly
until the next morning when a new cycle starts.
This project started in 2004 under a contract with European Space Agency to study the feasibility of a Martian Solair Airplane. A lot of work was done on the optimization of the various elements of the energy chain, from the solar celsl to the propeller. The actual prototype weighs 2.4 kg for a wingspan of 3.2 meters. The 216 silicone solar cells are able to deliver up to 90 W at noon during summer whereas the power consumption of the airplane is 16 W at level flight. In June 2008, the objective of Sky-Sailor was reached. The airplane flew more than 27 hours continuously and autonomously. This 874 km flight proved for the first time that it is feasible to stay in the air with the only use of solar energy, and at constant altitude, without the help of altitude gain before the night or thermal soaring.
Walking and Running Robots
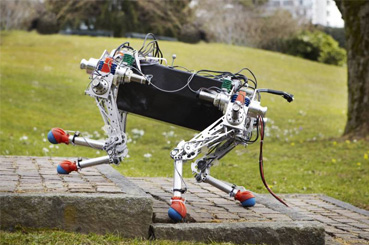
StarlETH - Dynamic Quadruped Locomotion
- StarlETH is a quadruped robot based on the high-compliant
series elastic leg ScarlETH. It was developed at our lab for fast,
efficient, and versatile locomotion on four legs. Using the same leg design
but with one additional degree of freedom per leg, we will be able to move
highly dynamic using different gaits, such as bounding, trotting, or
running.
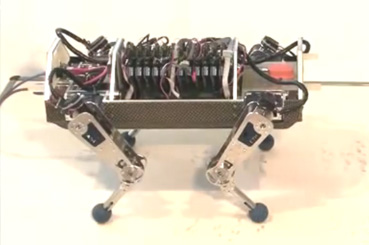
ALoF - Static Quadruped Locomotion
- The robotic platform ALoF (Autonomous Locomotion on Four legs) has been designed as a platform to support research on perception in legged locomotion. A very large range of leg motion allows to perform complex maneuvers that increase the robot's locomotion capabilities and help to actively explore its surroundings through haptic interaction. The platform weights about 15 kg and has a length of approx. half a meter. This means that the platform is small enough to be handled by one person alone, yet able to carry sufficient payload e.g. for sophisticated sensors.
Autonomous Vehicles


V-Charge - Autonomous Valet Parking
- The SPARC Project forms an European effort to improve
general trafic safety be aplying intelligent X-by-wire technology to
vehicles powertrains. Within this project the Autonomous Systems Lab of ETH
is envolved in the development of an intelligent driver assistant system
allowing the vehicle to detect environment features like lanes and other
traffic participants independently from the driver and devolop strategies
for a good reaction on that particular environment.
SPARC stands for Secure Propulsion using Advanced Redundant Control. The goal of SPARC is to substantially improve traffic safety and efficiency for heavy goods vehicles using intelligent x-by-wire technologies in the powertrain. To prove this standardized concept an automotive Software/Hardware platform will be developed that is scalable and usable from heavy goods vehicles down to small passenger cars (sPC) and be integrated therein. SPARC will propose a complete automotive concept of an open system architecture, where software functionalities of different partners can be integrated easily. Two validation vehicles of this architecture will be build and evaluated.The project V-Charge is based on the vision that, due to required drastic decrease of CO2 production and energy consumption, mobility will undergo important changes in the years to come. This includes new concept for an optimal combination of public and individual transportation as well as the introduction of electrical cars that need coordinated recharging. A typical scenario of such a concept might be automatic drop-off and recovery of a car in front of a train station without taking care of parking or re-charging. Such new mobility concepts require among other technologies autonomous driving in designated areas.
Swimming Robots

naro - the original (2008-2009)
- This robot was built after one of the fastest swimmers on
this planet. The Tuna. This species is nearly extinct due to excessive
overfishing which is just one more reason to highlight the specialities of
this fish. Tunas can swim up to 80km/h and can maintain 20km/h over long
periods. They are designed for fast and efficient swimming. On the other
hand they have a weak maneuverability.
naro - the original tried to study and understand the swimming behaviors of fish and imitated their movements according to self-made measurements and literature recherches. The main goal of this robot was to prove the concept of flapping fin propulsion for robotic purposes. However, he is not able to operate autonomously.
naro - the original, designed as a focus study project, functions as the proof of concept for bio-inspired locomotion principles and operates now on various exhibitions and shows. Experiences gained in this project are now used in the second robot to enhance fin locomotion as well as overall mechanical design.
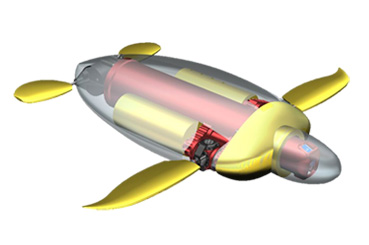
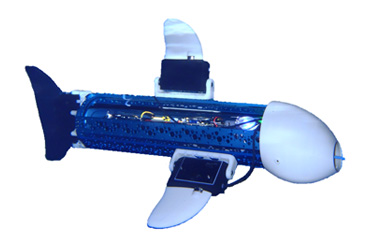
naro - tartaruga (2010 - ongoing)
- The second robot of the naro project continues the
concept of fin propulsion. The natural counterpart of this robot is the
sea-turtle. Also a highly endangered animal! But the reasons to choose the
turtle as model lie in the rigid body which is technically much simpler to
realize than a agile body of a fish. The big torso also provides enough
space for sensors and batteries which are essential for autonomy.
naro - tartaruga shall provide first direct measurements on energy consumption for a flapping fin mechanism in robotics. A speciality hereby is the fully 3D mechanism. All actuators, three for each fin, are in the same, waterproof body but they all still actuate the fin axle independently. Common systems use serial actuation principles where one motor drives a box with another motor which again drives the fin. This concept requires multiple sealed bodies and cables going from one to another which raises the energy consumption and risk of leakage.
Another purpose of naro - tartaruga will be the development of autonomous navigation under water. The robot will be a platform allowing the use of different sensors for various tasks. Symmetric and clearly defined mechanical interfaces at the head and tail allow the exchange of modules for future research on underwater autonomy.
naro - nanins (2013 - ongoing)
- the newest robot in the naro family! The small, customizeable edutainment robot. Four freely positionable actuator modules can be attached to a main robot body. Various fish types could be imitated or new ones created. A dive cylinder additionaly allows static diving.
Personal and Service Robots
BCSA - Bayesian Approach to Cognitive Systems (completed)
- Contemporary robots and other cognitive artifacts are not
yet ready to autonomously operate in complex real world environments. One of
the major reasons for this failure in creating cognitive situated systems is
the difficulty in the handling of incomplete knowledge and uncertainty.
By taking up inspiration from the brains of mammals, including humans, the BACS project will investigate and apply Bayesian models and approaches in order to develop artificial cognitive systems that can carry out complex tasks in real world environments. The Bayesian approach will be used to model different levels of brain function within a coherent framework, from neural functions up to complex behaviors. The Bayesian models will be validated and adapted as necessary according to neuro-physiological data from rats and humans and through psychophysical experiments on humans. The Bayesian approach will also be used to develop four artificial cognitive systems concerned with (i) autonomous navigation, (ii) multi-modal perception and reconstruction of the environment, (iii) semantic facial motion tracking, and (iv) human body motion recognition and behavior analysis. The conducted research shall result in a consistent Bayesian framework offering enhanced tools for probabilistic reasoning in complex real world situations. The performance will be demonstrated through its applications to driver assistant systems and 3D mapping, both very complex real world tasks.

COGNIRON - The Cognitive Robot Companion (completed)
- The overall objectives of this project are to study the
perceptual, representational, reasoning and learning capabilities of
embodied robots in human centered environments. The project develops methods
and technologies for the construction of such cognitive robots, able to
evolve and grow their capacities in close interaction with humans in an
open-ended fashion.
Expected results are basic methods, algorithms and architectures and their integration and long-term experimentation and scientific evaluation on embodied robotic systems in different settings and situations.
In the focus of this research endeavor, is the development of a robot whose ultimate task is to serve humans as a companion in their daily life. The robot is not only considered as a ready-made device but as an artificial creature, which improves its capabilities in a continuous process of acquiring new knowledge and skills.
Besides the necessary functions for sensing, moving and acting, such a robot will exhibit the cognitive capacities enabling it to focus its attention, to understand the spatial and dynamic structure of its environment and to interact with it, to exhibit a social behavior and communicate with other agents and with humans at the appropriate level of abstraction according to context.
The design of the cognitive functions of this artificial creature and the study and development of the continuous learning, training and education process in the course of which it will mature to a true companion, are the central research themes of the project.

EUROPA
- EUROPA - European Robotic Pedestrian Assistant is a
project funded by the European Commission within FP7. The goal of the EUROPA
project is to develop the foundations for service robots designed to
autonomously navigate in urban environments outdoors as well as in shopping
malls and shops to provide various services to users including guidance,
delivery, and transportation.
In the field of robotics, there has recently been a tremendous progress in the development of autonomous robots that offer various services to their users. Typical services include support of elderly people, cleaning, transportation and delivery tasks, exploration of inaccessible hazardous environments, or surveillance. Most of the systems developed so far, however, are restricted to indoor scenarios, non-urban outdoor environments, or road usage with cars. There is serious lack of capabilities of mobile robots to navigate safely in highly populated outdoor environments. This ability, however, is a key competence for a series of robotic applications.
Space and Rescuing Robots

ARTOR - The Autonomous Rough Terrain Outdoor Robot
- s project aims at the development of techniques for
reliable autonomous navigation of a wheeled robot in rough, outdoor terrain.
The robot must be able to navigate and localize itself in unknown,
challenging environments without using global position sensors (such as
GPS). Leaving flat and well-structured environments, such as streets or
office rooms, comes along with a series of challenges for navigation. The
terrain not only becomes three-dimensional, but also exhibits various
different surfaces (vegetation, gravel, sand, rocks, etc.).
For reliable autonomous navigation in such terrain, the robot must first localize itself in six dimensions and build a three-dimensional map of the environment, based on sensor data. Furthermore, the traversability of individual parts of the surroundings has to be determined, in order to be able to plan a safe path leading the robot towards the desired location. Computation of this path is not only based on the need to avoid obstacles, but also on the shape (steepness) and traversability of different parts of the terrain.
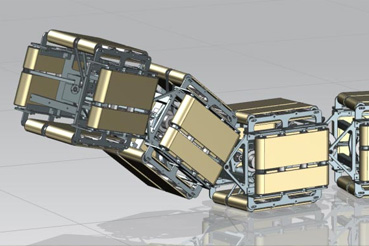
Traloc - The Rescue Snakebot (completed)
- Within the scope of a focus project, which is part of the
bachelor studies in mechanical engineering at the ETH Zurich, we intend to
develop and build a snakelike system. The goal is to provide a system which
is capable to conquer the debris resulting after an earthquake and to
support the first responders in localizing buried victims. Not only is the
desperation high among the affected population but also are the expectations
great towards the rescuers. Additionally to the already chaotic situation,
the difficult logistics and possibly negative, environmental influences are
resulting in an increase of pressure and delay in the rescue. Because of the
dramatically decreasing chance of survival after 72 hours, it is
indispensable that the rescue is as much facilitated as possible.
Our response to this situation is a robot called traloc, which supplements a more precise and faster possibility to locate victims to the already existing. The target is to develop and construct such a robot which is able to handle the specifications that are a result of the debris
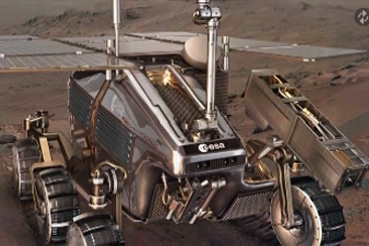
RCET - Mars Rover Evaluation Tools (completed)
- RCET is a project funded by the European Space Agency (ESA; contract no: 18191/04/NL/PM). It aims at providing at set of software and hardware tools for performance evaluation of rough-terrain robots.
Edutainment Robots
- Text
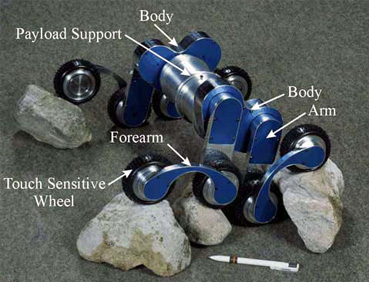
Octopus - The Rough Terrain Robot (completed)
- An Autonomous Wheeled Climbing Robot with Tactile Wheels
The function of a mobile robot is to move from place to place autonomously, i.e. without human intervention. Building mobile robots able to deal autonomously with obstacles in rough terrain is a very complex task because the nature of the terrain isn’t known in advance and may change in time. The role of the path planner is to determine a trajectory in order to reach the destination while avoiding obstacles and without getting stuck. A true autonomous mobile off-road robot has to be able to evaluate its own ability to cross over the obstacles it may encounter.

Rezero - The Balancing Ballbot
- Within their Bachelor courses, Mechanical Engineering
students at ETH are able to focus on a project work. In a team ideas are
developed and fixed, with the goal to create a new product or prototype
within one year. The approach to their own problem is freely chosen by the
team members, supported by academic and industrial experts. Starting with an
idea, the students are responsible for all necessary steps for the
prototype, including
concepts, calculations, design, manufacturing and assembly. However, also soft-skills, not only within the team, have to be taken into account. Suppliers and Manufacturers have to be convinced and in discussions with experts information and knowledge needs to be gained and finally integrated into the project.
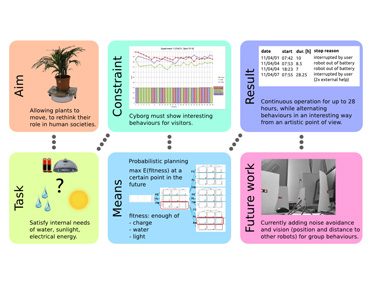
Plant-Robot - If Plants Could Move
- Autonomous robotic green plants
Allowing plants to move, to rethink their role in human societies.
Industrial Service Robots
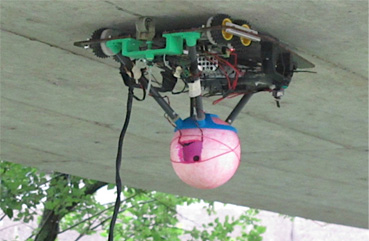
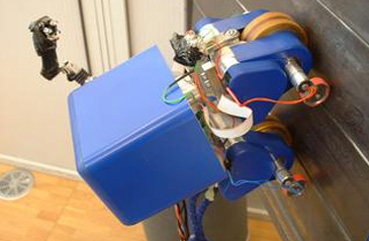
Climbing robot for corrosion monitoring
- Half-cell potential mapping can detect chloride induced
corrosion of the reinforcement in a very early state. The combination with a
Vortex climbing robot allows to get acces to any concrete surface.
Corrosion of the reinforcing steel adversely affects durability and safety of our infrastructure (bridges, power plants or buildings) with huge annual costs. In the US 325 - 1000 Mio (2000), in the UK 550 Mio were attributed to corrosion of reinforced concrete structures. In Switzerland detailed costs are reported for repair and maintenance of the national highway system, showing an increase from 249 Mio (1995) to 768 Mio (2010). While corrosion of the reinforcing steel might not be the sole cause of all repair work, it is a significant contributor. A timely detection of corrosion thus could greatly reduce the costs of repair interventions.
MagneBike - Multi-Robot Power Plant Inspection (completed)
- Inspection of complex environment with compact mobile
robots
1.Wide range of inner diameters: it varies from 200mm (max. robot
space envelope) up to 700mm.
2.Local abrupt inner diameter changes, up to 50mm: 90° convex or
concave obstacles.
3.Complex arrangement and sequence of the obstacles: triple step
or gap.
4.Any inclination can be encountered: climbing ability is required.
5.Maneuver about in narrow locations and travel on circumferential
paths.