- ROBOTICS 21XX
- ROBOTICS 21XX is the online show of manufacturers of industrial robots

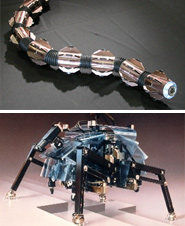
- Snake Robots, Walking Robots, Wheeled & Crawler Vehicle, Colony Robots...

- Our research ranges from mechanical principles to novel fabrication techniques to system integration of autonomous millirobots.


- Research in the fields of robotics, mobile robots, agriculture automation, health robotics...


- MIT biomimetic robotics lab aspires to build a mutidisciplinary foundation of hyperdynamic robotics.


- Develops and prototypes experimental mobile robot systems including obstacle avoidance systems, positioning systems...


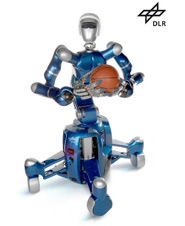
- Fundamental research in robotics, vision, perception, control, automation and learning


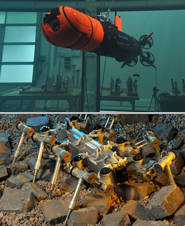
- The DFKI develops mobile robot systems which are able to solve complex tasks on land, under water, or in the air.

- Research projects in automation, principally in the meat, seafood, and other primary industries.

- Our research focuses on the interfaces between robots and biological systems.


- Our Research is based on the interdisciplinary design, computer-aided optimisation and simulation and complex mechatronic systems
- Unmanned Aerial Vehicles, Remote sensing & environmental monitoring, Remote inspection & repair
Biologically inspired engineering


- High-performance mobile robot platforms and complete service robot applications for a day-to-day usage.

- NREC automation solutions for every industrial, agricultural or municipal needs.

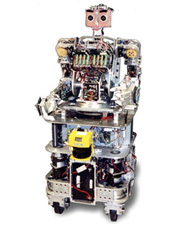
- ROBO GARAGE creates, designs, and invents unique and original humanoids for Exhibitions and even TV commercials...


- Combat robots, walking humanoids, soccer bots, sumo bots, and kung-fu androids. The robots are autonomous or remote controlled.


- The laboratory is working in the field of automation technology including robotics, mechatronics & control of industrial processes


- Human robot interaction, robot navigation, neural computing and machine learning


- Focuses on the development of robotics & artificial intelligence methods inspired by biological principles of self-organization.


- A Swiss company that develops, manufactures and markets high quality mobile robots for use in advanced education and research


- Research in Robotics Control, Computer-Aided Design, Computer Graphics, Artificial Intelligence...

- Hypermobile robot
Pneumatic jumping robots
Rehabilitation robots
Wire suspended robot crane


- Micro-motion manipulators, robotic measurement systems, mobile robotics and the modelling of insects through robotics.


- Computational theory and mechatronic engineering, snake robots, surgical robots...

- The RTS focuses its work on the fields of distributed automation systems and mobile service robots.


- Our research interests are in the area of Robot Locomotion and Manipulation, Kinematics and Mechanisms, and Autonomous Systems.


- Centre for Robotics and Intelligent Systems -
School of Computing, Communications and Electronics


- One of the leading distributors and makers of robotics parts within the robotics mobility and competition market.

- Rersearch in the fields of industry, medical and mobile robots, controls and image processing.

- Our mission is to understand the science, engineering and social role of robotics and embedded intelligence


- Humanoid Robot "LOLA", Biped Robot JOHNNIE, CVT, Valve Train Dynamics, Cyberwalk and Cybercarpet...
- Researchers working at AIRLab have always followed and leaded the evolution of AI and Robotics.


- We apply artificial intelligence methods to various types of real robots: mobile robots, manipulating robots, and humanoid robots


- Autonomous Robotics is an interdisciplinary field of research which focuses on cognitive and physical abilities


- Software and hardware for mobile robots, embedded systems, autonomous agents and in-situ evaluation


- Dedicated to the development of robotic mechanical systems that generate spatial (i.e. 3-dimensional) motion & force transmission


- doing research on all types of autonomous mobile robots, including intelligent driving and walking robots, AUVs, and UAVs


- The Computational Learning & Motor Control Lab
Research in the areas of neural computation for sensorimotor control and learning.


- Autonomous service & social robots, human-robot interaction, cognitive architectures, neurorobotic & motor neuroprosthetic systems

- CVRL is a research facility specializing in the theoretical and applied research in computer vision and robotics.

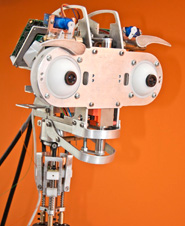
- We explore, design, and build robotic systems that move swiftly and can easily handle impacts and kinetic energy transfer.


- Focused on the study of parallel mechanisms and articulated robotic hands — Modelling and control of complex robotic systems.


- strives to realize robots and autonomous systems that are effective collaborators for pursuing human endeavors


human - robot - interaction
Laboratory
- is a leader in supporting efforts to integrate engineering into K-12 education.

- Robots using adhesion technology, haptics, seabed underwater robotics, scansorial, climbing and maneuvering robots

- We build machines which exploit their natural dynamics to achieve extraordinary agility and efficiency


- LRP studies experimental platforms include sensor networks, mobile manipulators, and integrated bimanual humanoids.


- SRL is dedicated in research and development in making social robots ubiquitous parts of our day to day lives.

- Autonomous & assistive robotics, space flight life support systems, arctic navigation, surveying, perception, reasoning

- IRIDIA is deeply involved in theoretical and applied research in computational intelligence.


- Robotics and Intelligent Systems group focus on robotics, electronics and machine learning.

- RoboLab conducts research in Autonomous Robots, Social Robotics and Computer Vision

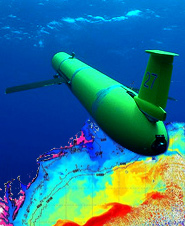
- A ROBOT CROSSING THE ATLANTIC!
Our research focuses on the bio-physical processes of the coastal ocean.

- Intelligent robots (construction, control and training) and artificial intelligence.

- Research and education environment for the development of Mechatronics and Robotics Technologies

- Personal Robotics Lab researches fundamental problems in robotics, in order to enable personal robots to perform challenging tasks


- Developing Albots providing significant insights into how humans and animals compute representations of their spatial environments

- Our research focuses on design, fabrication, control, and analysis of biologically-inspired microrobots and soft robots.



















