
- Offer Profile
-
We conduct research projects in the two fields of Product Design and Autonomous Systems. To learn more about our projects you can either access the individual project description through the alphabetic lists of current and finished projects or have a look at the two project lists sorted by research themes.
Current Projects
BACS - Bayesian Approach to Cognitive Systems

- Contemporary robots and other cognitive artifacts are
not yet ready to autonomously operate in complex real world environments.
One of the major reasons for this failure in creating cognitive situated
systems is the difficulty in the handling of incomplete knowledge and
uncertainty.
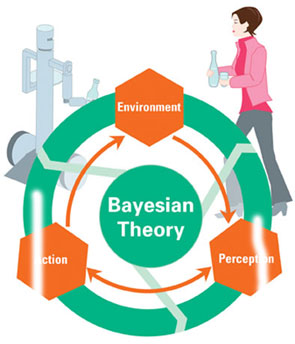
By taking up inspiration from the brains of mammals, including humans, the BACS project will investigate and apply Bayesian models and approaches in order to develop artificial cognitive systems that can carry out complex tasks in real world environments. The Bayesian approach will be used to model different levels of brain function within a coherent framework, from neural functions up to complex behaviors. The Bayesian models will be validated and adapted as necessary according to neuro-physiological data from rats and humans and through psychophysical experiments on humans. The Bayesian approach will also be used to develop four artificial cognitive systems concerned with:- autonomous and semi autonomous navigation
- multi-modal perception and reconstruction of the environment
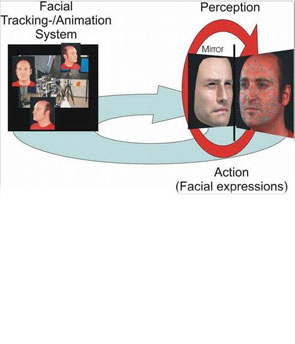
- semantic facial motion tracking
- human body motion recognition and behavior analysis
The conducted research shall result in a consistent Bayesian framework offering enhanced tools for probabilistic reasoning in complex real world situations. The performance will be demonstrated through its applications to driver assistant systems and 3D mapping, both very complex real world tasks.
blue-c II


- blue-c II is a collaborative project at ETH together
with the institutes CAAD, CGL, CVG, IWF.
The focus of blue-c-II is to investigate and develop fundamental methods for collaboration environments and multi-modal acquisition, interaction with large and complex physical environments and the usage of data.
Within this institute, "data handling" will be researched to support the collaborative process of co-located and remote teamwork within the "virtual project room". Therefore it focuses on data-handling in order to elaborate, collect, share and interact with data. The final goal of this project is to improve the efficiency as well as the effectiveness of the collaborative and interdisciplinary product design process by applying new communication technologies such as eye-to-eye videoconferencing and video-based interaction.
COGNIRON (Cognitive Robot Companion ; 2004-07)

- Description of the project
The overall objectives of this project are to study the perceptual, representational, reasoning and learning capabilities of embodied robots in human centered environments. The project develops methods and technologies for the construction of such cognitive robots, able to evolve and grow their capacities in close interaction with humans in an open-ended fashion.
Expected results are basic methods, algorithms and architectures and their integration and long-term experimentation and scientific evaluation on embodied robotic systems in different settings and situations.
In the focus of this research endeavor, is the development of a robot whose ultimate task is to serve humans as a companion in their daily life. The robot is not only considered as a ready-made device but as an artificial creature, which improves its capabilities in a continuous process of acquiring new knowledge and skills.
Besides the necessary functions for sensing, moving and acting, such a robot will exhibit the cognitive capacities enabling it to focus its attention, to understand the spatial and dynamic structure of its environment and to interact with it, to exhibit a social behavior and communicate with other agents and with humans at the appropriate level of abstraction according to context.
The design of the cognitive functions of this artificial creature and the study and development of the continuous learning, training and education process in the course of which it will mature to a true companion, are the central research themes of the project.Research Area within project (Spatial Cognition and Multimodal Situational Awareness)
To address the understanding of how an embodied system can come to a conceptualization of sensory-motor data, generate plans and actions to navigate and manipulate in typical home settings. The concept formation is considered in a broad sense, i.e. the ability to interpret situations, i.e. states of the environment and relationships between components of the environment that are static or evolving over time. The robot can observe these states or be part of the evolving action itself.
The robot will use different sensing modalities, and can also act in order to improve its understanding of the situation or to disambiguate its interpretation.
- Description of the project
- (credits: LAAS-CNRS)
- (credits: LAAS-CNRS)
Dynamic Locomotion with Quadrupeds

- This projects aims towards the design and construction
of an energy efficient robotic quadruped that is capable of various dynamic
motions including fast walking, trotting, bounding, and galloping. The
primary focus is the production of an actual mechanical prototype. The
prototype and the associated control strategies will be developed so as to
maximize dynamic performance while minimizing energy consumption. In
particular, to make the system as energy efficient as possible, we intend to
exploit natural, or passive, dynamics in ways that have been the focus of
significant previous research and shown themselves to be effective in
bipedal robots. The extension of the concept of passive dynamics to
quadrupedal robots, and more importantly the actual realization of such a
system, has to date received very little attention by other researchers. The
principal parts of the project are:
- Developing simulation capabilities to aid design calculations and evaluate controller performance.
- The development of fundamentally new control strategies that incorporate the advantageous characteristics of passive dynamics into an optimal controller with deadbeat attitude feedback.
- Designing, fabricating, and testing a mechanical prototype to evaluate controller stability, robustness, and performance.
- This projects aims towards the design and construction
of an energy efficient robotic quadruped that is capable of various dynamic
motions including fast walking, trotting, bounding, and galloping. The
primary focus is the production of an actual mechanical prototype. The
prototype and the associated control strategies will be developed so as to
maximize dynamic performance while minimizing energy consumption. In
particular, to make the system as energy efficient as possible, we intend to
exploit natural, or passive, dynamics in ways that have been the focus of
significant previous research and shown themselves to be effective in
bipedal robots. The extension of the concept of passive dynamics to
quadrupedal robots, and more importantly the actual realization of such a
system, has to date received very little attention by other researchers. The
principal parts of the project are:
Exomars
- Autonomous vehicles in uneven terrain need to rely on
efficient suspension mechanisms that allow negotiating obstacles of
different kinds, while consuming the least energy possible to increase the
time of autonomy. There is an increasing need for all-terrain robots,
especially in places that are not accessible by humans or where the risk of
a human mission is too high, e.g. space exploration or operations in
unstructured, hazardous or polluted environment.
The ASL took part in various phases of the Exomars project and the work of its collaborators is summarized in the following sections:
Pre-study phase A
coming soon...
Pre-study phase B1
A trade-off between possible suspension mechanism candidate was conducted. It involved the RCL-C, RCL-E and the CRAB. In order to test these on an equal basis, their weight, footprint and wheels where the same. This was achieved using a modular structure. The tests were conducted on well-defined obstacle (e.g. such as the step, and so on...) which offered the equal tests conditions for all the candidates.
Phase B1
ASL was first responsible for implementing the low-level control algorithms of the rover BreadBoard. The software was implemented on a LEON2 microprocessor, using RTEMS.
The second activity of ASL within phase B1 was to conduct the test campaign with the BreadBoard, into the Oerlikon Space facilities. This received a quite large echo in the media, as it can be seen below.
GTT
- Fast climbing robots for environments made out of thin
metal sheets
The original purpose of this project was the inspection of gas tanks in oversea ships. These expensive tanks have to be inspected regularly for leaks. For doing this, helium gas in inserted from the back and a sniffer probe has to be carried to every point in the tank to find the leaks. The current method using a tethered blimp was too slow and imprecise. Thus, the goal was to access these areas with climbing robots that attach to the surface. Using a state-of-the-art climbing robot was not possible due to the following restrictions:- Low allowed mass, need for high speed
suction cups are not possible, magnetic wheels seem the only promising solution
- Thin sheet material
the magnetic force is limited by saturation in the ground
- Difficult obstacles
need for mechanisms to carry the wheels over the obstacles
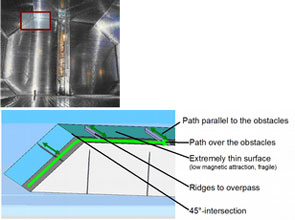
We now developed a new inspection system that can solve all the challenges in this application. The main innovative ideas within this system are
- Separation into two robots: A big robot with high obstacle-passing capabilities carries a second one over the obstacles. This second robot is very simple, lightweight and fast and can drive on the fragile surfaces.
- Magnetic wheels that are specially optimized for thin surfaces
- Active structure that allows for passing ridge-type obstacles
The actual results are a detailed robot design for the whole system and prototype of the small robot, but the project is in standby for the moment.
- Low allowed mass, need for high speed
- Fast climbing robots for environments made out of thin
metal sheets
IM2
- The idea of controlling machines not by manual
control, but by mere "thinking" (i.e., the brain activity of human subjects)
has fascinated humankind since ever, and researchers working at the
crossroads of computer science, neurosciences, and biomedical engineering
have started to develop the first prototypes of brain-machine interfaces
(BMI) over the last decade or so. Thus, researchers have been able to train
monkeys, who had implanted tens of microelectrodes in their brain, to
control a robot arm. Human subjects, on their side, have shown the
possibility to drive a mobile robot between rooms in a house model using
non-invasive EEG recordings .
Although these promising first results are attracting significant attention from an increasing number of research laboratories around the world, most of the issues being explored are related to "augmented communication" where fast decision-making is not critical as it is the case for real-time control of robotics devices and neuroprosthesis. The latter kind of applications is the most challenging for BMI and it is the goal of this project. In particular, we will explore mental teleoperation of a mobile robot based on non-invasive brain activity related to motor tasks (i.e., subjects imagine natural movements of their body that are translated into similar actions of the robot) and multiple modalities of feedback (visual, auditory, haptic and vestibular).
KoBaS - Knowledge Based Customized Services
- The Problem Addressed
In order to pursue the increasing needs of flexibility and competitiveness, manufacturing machines are growing more and more complex. Thus the tasks performed by these machines become complex too. The greater integration between the machine performances and the related process parameters becomes also a crucial requirement that the user of the manufacturing machine has difficulties to grasp and control. Task planning, maintenance, configuration, training…, as a result, grow complex too and new competencies and larger knowledge of the process parameters, machine performances and their interaction are needed.
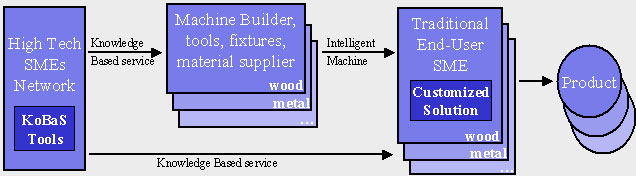
Project Short Description
The project objective is to promote a Network of SMEs capable of providing “KoBaS services”, where the service is a customized knowledge based solution, developed, thanks to the methodologies and tools studied and realized within the project, for the specific machine, that will enhance machine performance under several aspects:- Man-Machine interface based on low cost Virtual Reality
- Machine task programming based on Knowledge Based Systems
- Machine task Simulation in a innovative three-dimensional customized environment
- Real Time Analysis services for the evaluation of the quality of the item produced
- Machine Configuration Support and Mechatronics
- Advanced Machine maintenance with autonomous decision making and leaning capabilities
- Machine training based on Virtual Reality techniques
- Machine management functions
The KoBaS consortium consists of a well-balanced mix of 27 international partners, coming from 10 different European countries and China, including 17 SMEs, 2 Industries and 8 RTD performers. ASL at ETH Zurich is responsible for the service ‘Machine Configuration Support and Mechatronics’.
- The Problem Addressed
Magnebike: Compact Magnetic Wheeled Inspection Robot with High Mobility
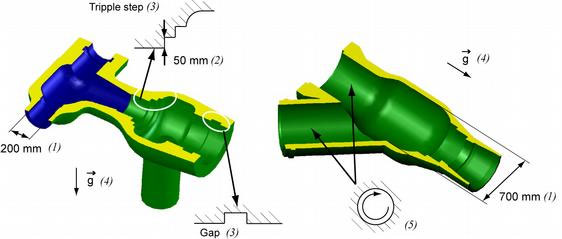
- Motivation
Inspection of complex environment with compact mobile robots- Wide range of inner diameters: it varies from 200mm (max. robot space envelope) up to 700mm.
- Local abrupt inner diameter changes, up to 50mm: 90° convex or concave obstacles.
- Complex arrangement and sequence of the obstacles: triple step or gap.
- Any inclination can be encountered: climbing ability is required.
- Maneuver about in narrow locations and travel on circumferential paths.
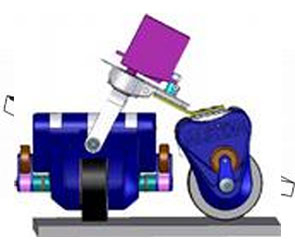
Robot Concept
- Motivation
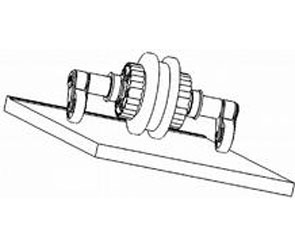
- Wheel unit with lifter/stabilizer arms
- Robot on a flat surface

- Robot on a curved surface
muFly

- Autonomous micro flying robots combine a large variety
of technological challenges and are therefore an excellent showcase for
leading edge micro/nano technologies and their integration with information
technology towards a fully operational intelligent micro-system. This
project proposes, therefore, the development and implementation of the first
fully autonomous micro helicopter comparable in size and weight to a small
bird. The key challenges of the project include innovative concepts for
power sources, sensors, actuators, navigation and helicopter design and
their integration into a very compact system. The envisaged fully autonomous
micro-helicopter will weight less than 30g and measure only 10cm in
diameter. The project shall develop and demonstrate innovative approaches
and technologies in:
- system level design and optimization of autonomous micro aerial vehicles,
- multifunctional use of components (integration of camera and distance sensor, batteries doubling as structural elements, or a propeller used for gyroscopic stabilization),
- design of "smart" miniature inertial sensors and omnidirectional vision sensors with polar pixel arrangement,
- miniaturized fuel-cells,
- miniaturized piezoelectric actuators with enhanced power to weight ratios, and
- control and navigation concepts that can cope with limited sensor and processing performance.
The final system is expected to find applications in surveillance of buildings and large indoor areas that are difficult to access on wheels or legs, rescue missions in
buildings after natural disasters or terror attacks, surveillance of dangerous areas, chemical and nuclear plants or law enforcement in public areas. The resulting micro-helicopter will represent the first demonstration of a fully autonomous indoor flying robot of its size and its successful realization will be a landmark achievement in integrated micro/nano technology and micro aerial vehicles.
- Autonomous micro flying robots combine a large variety
of technological challenges and are therefore an excellent showcase for
leading edge micro/nano technologies and their integration with information
technology towards a fully operational intelligent micro-system. This
project proposes, therefore, the development and implementation of the first
fully autonomous micro helicopter comparable in size and weight to a small
bird. The key challenges of the project include innovative concepts for
power sources, sensors, actuators, navigation and helicopter design and
their integration into a very compact system. The envisaged fully autonomous
micro-helicopter will weight less than 30g and measure only 10cm in
diameter. The project shall develop and demonstrate innovative approaches
and technologies in:
robots@home


- The objective of robots@home is to provide an open
mobile platform for the massive introduction of robots into the homes of
everyone.
The innovations will be:- A scaleable, affordable platform in response to the different application scenarios of the four industrial partners: domotics, security, food delivery, and elderly care.
- An embedded perception system providing multi-modal sensor data for learning and mapping of the rooms and classifying the main items of furniture.
- A safe and robust navigation method that finally sets the case for using the platform in homes everywhere. The system is tested in four homes and at a large furniture store, e.g., IKEA. Developers as well as lay persons will show the robot around, indicate rooms and furniture and then test the capabilities by commanding to go to the refrigerator or dining table.
The scenario-driven approach is inspired by recent work in cognitive science, neuroscience and animal navigation: a hierarchical cognitive map incorporates topological, metric and semantic information. It builds on structural features observed in a newly developed dependable embedded stereo vision system complimented by time-of-flight and sonar/infrared sensors. This solution will be developed along three progressively more challenging milestones leading up to a mobile platform that learns four homes, navigates safely and heads for at least ten annotated pieces of furniture.
Sky-Sailor


- The goal of this project is to design and build a
solar powered micro airplane for autonomous exploration. This system, named
Sky-Sailor, is fully autonomous in navigation and power generation. Equipped
with solar cells covering its wing, it retrieves energy from the sun in
order to supply power to the propulsion system and the control electronics,
and charge the battery with the surplus of energy. During the night, the
only energy available comes from the battery, which discharges slowly
until the next morning when a new cycle starts.
This project started in 2004 under a contract with European Space Agency to study the feasibility of a Martian Solair Airplane. A lot of work was done on the optimization of the various elements of the energy chain, from the solar celsl to the propeller. The actual prototype weighs 2.4 kg for a wingspan of 3.2 meters. The 216 silicone solar cells are able to deliver up to 90 W at noon during summer whereas the power consumption of the airplane is 16 W at level flight. In June 2008, the objective of Sky-Sailor was reached. The airplane flew more than 27 hours continuously and autonomously. This 874 km flight proved for the first time that it is feasible to stay in the air with the only use of solar energy, and at constant altitude, without the help of altitude gain before the night or thermal soaring.
SPARC
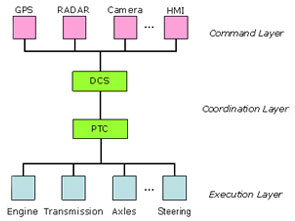

- The SPARC Project forms an European effort to improve
general trafic safety be aplying intelligent X-by-wire technology to
vehicles powertrains. Within this project the Autonomous Systems Lab of ETH
is envolved in the development of an intelligent driver assistant system
allowing the vehicle to detect environment features like lanes and other
traffic participants independently from the driver and devolop strategies
for a good reaction on that particular environment.
SPARC stands for Secure Propulsion using Advanced Redundant Control. The goal of SPARC is to substantially improve traffic safety and efficiency for heavy goods vehicles using intelligent x-by-wire technologies in the powertrain. To prove this standardized concept an automotive Software/Hardware platform will be developed that is scalable and usable from heavy goods vehicles down to small passenger cars (sPC) and be integrated therein. SPARC will propose a complete automotive concept of an open system architecture, where software functionalities of different partners can be integrated easily. Two validation vehicles of this architecture will be build and evaluated.
Finished Projects
Front End
- The goal of this project is to develop integrative methods for the Front End of the Product Innovation Process. It was conducted in collaboration with toolpoint and ITEM, University St. Gallen.
I-Puls
- I-Puls: Measurement and Development of Innovation
Capability
The goal of this project was to develop a method to measure and to improve innovation capability of Swiss Small and Medium Sized Companies. The method has been developed and applied with several project partners (Alcan, Mammut, Furrer-Jacot, Marquardt etc.). The method is supported by a Web Application (www.ipi.ethz.ch) and so allows the documentation of the whole process.
The CTI-funded project I-Puls was finished in 2007. We continue applying and improving the I-Puls tool.
MPPro
- MPPro - Variant Management of Modular Product
Families
Today, companies face increasing cost pressure and a growing demand for customization of products. An answer to this double challenge is effective variant management using modular product families. This allows for economies of scale through the reuse of modules and customization through customer-specific configuration of modules. While numerous well-established approaches exist to initially define a modular product family, the variant management of the modular product family in the market phase, has not yet been answered in research.
This question is of vital importance though. Many companies experience that in the market phase of the modular product family, more and more special products are being brought to market whose cost/sales price ratio is significantly worse than that of standard products. As a result, the modular product family as a whole becomes less and less profitable. What is needed, are concepts and tools to support the variant management of modular product families in the market phase. The required concepts and tools are developed within this project.
Skip
- The goal of this project was to improve the innovation processes in Swiss Small and Medium Sized Companies. The resulting innovation process model is documented on www.ipi.ethz.ch and in Markus Bircher (2005): Die integrale Produktinnovation. The simulation tool of the front end of innovation is documented in Vera de Vries (2006): Systemtheoretischer Ansatz für die frühe Phase des Produkt-Innovationsprozesses.