
- Offer Profile
- A&R Technology Co.,Ltd Short as A&R located in Shenzhen China. We are China robotics arm supplier and aim at providing the highest cost-effective robotics to system integrator and end user all over the world. We work with AUBO robotics. ADTECH technology , Tiantai robotics and also we have a wealth of experience in used robot such as EPSON, YAMAHA, Funuc,KUKA and ABB. This is for customer who have budget limited.
We focus on automobile industry, electric& electronics, food industry and metal working.
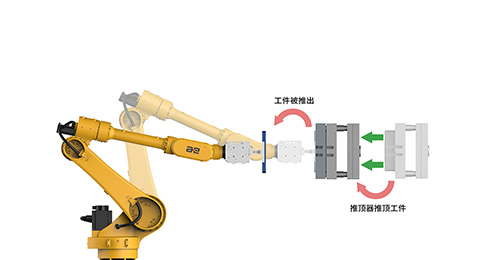
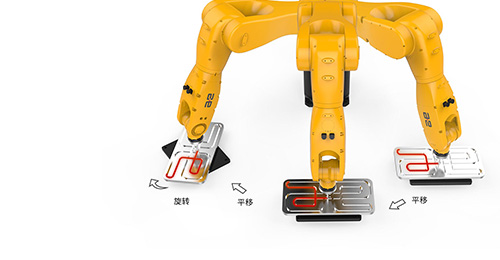
What we have application by robots- Pick&place application
- Palletizing application
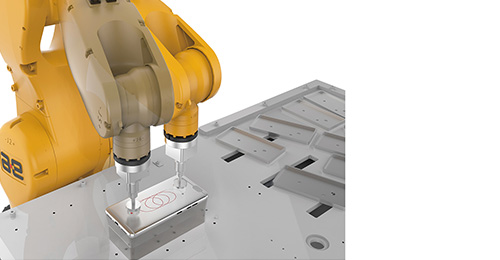
- Assmebly application
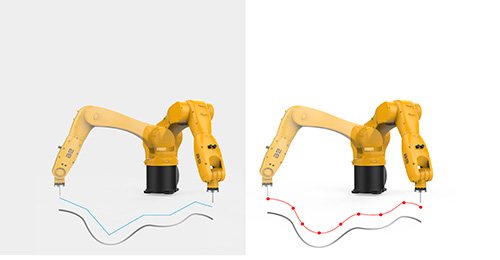
- Vision detection application
- Screw driving application
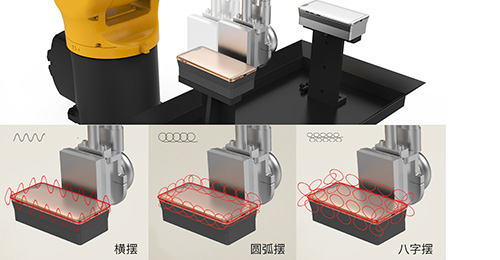
- Glue dispensing application
AE ROBOT

- AE peitian robot is china's top brand manufaturer. A&R offer the AE peitian robot to overseas markets to a good price.

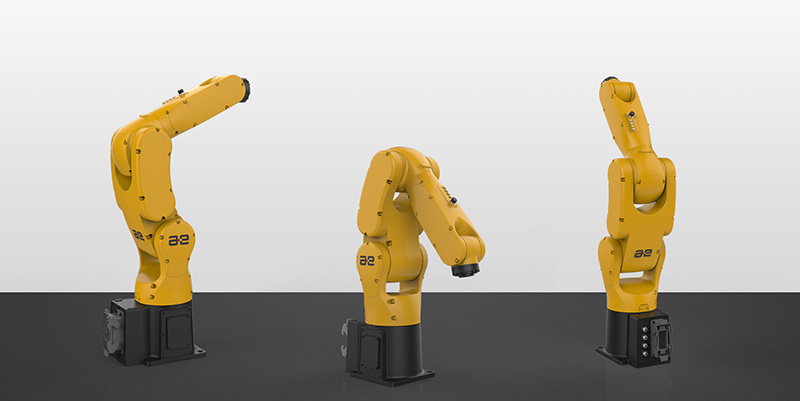


AIR3-A
-
High speed, High precision, High stability, Small and Agile
- The standard cycle time is less than 0.33s, meeting your pursuit for the
maximum output in the shortest time. - Advanced heat dissipation design of motor, enables AIR3-A to easily cope
with the high heat generated by high-intensity repetitive operation in the
3C industry. - AIR3-A is very ideal for narrow space operation, as well as highly precise
operations in 3C field. AIR3-A is widely used in assembly, handling,
screwing and testing of small workpieces.
Axis No. 6 AXIS Max. payload 3kg Arm reach 560mm Weight 23kg Position repeatibility +/-0.02mm IP Class IP65 Mounting Floor/ wall / ceilling Joint working range Joint 1 -170°/+170° Joint 2 -110°/+120° Joint 3 -110°/+155° Joint 4 -200°/+200° Joint 5 -120°/+120° Joint 6 -350°/+350° Joint speed Joint 1 450°/s Joint 2 450°/s Joint 3 540°/s Joint 4 600°/s Joint 5 600°/s Joint 6 800°/s Controller model inCube 10/20 - The standard cycle time is less than 0.33s, meeting your pursuit for the


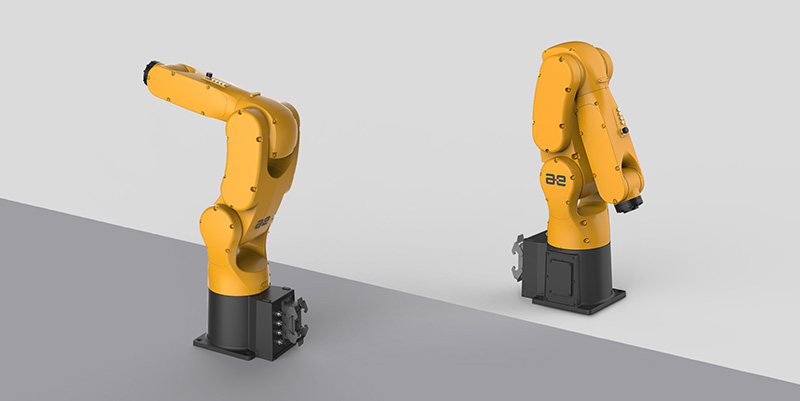
AIR6-A
-
High speed, High precision, High stability, Strong scalability
- Compact design, saving space.
- AIR6-A is very ideal for narrow space operation.
- AIR6-A is widely used in handling, assembly, loading &unloading,
grinding, packing, testing and labeling of small workpieces. AIR6-A can
meet the demands of customers for low load, high precision and high
speed.
Axis No. 6 AXIS Max. payload 6kg Arm reach 710mm Weight 45kg Position repeatibility +/-0.02mm IP Class IP65 Joint working range Joint 1 -170°/+170° Joint 2 -100°/+135° Joint 3 -120°/+156° Joint 4 -200°/+200° Joint 5 -135°/+135° Joint 6 -360°/+360° Joint speed Joint 1 380°/s Joint 2 350°/s Joint 3 460°/s Joint 4 480°/s Joint 5 550°/s Joint 6 800°/s Controller model inCube 10/20


AIR6L-A
-
High speed, High precision, High stability, Longer arm, IP 67
- AIR6L-A can keep high performance under the harsh environment full of
dust or water. - Flexible and fast, with 920mm reach, AIR6L-A is especially suitable for
multi-station operation in 3C field, such as loading & unloading, handling,
palletizing, grinding and polishing, as well as sorting and palletizing in
intelligent storage field.
Axis No. 6 AXIS Max. payload 6kg Arm reach 920mm Weight 47kg Position repeatibility +/-0.02mm IP Class IP65 Joint working range Joint 1 -170°/+170° Joint 2 -100°/+135° Joint 3 -120°/+156° Joint 4 -200°/+200° Joint 5 -135°/+135° Joint 6 -360°/+360° Joint speed Joint 1 380°/s Joint 2 350°/s Joint 3 460°/s Joint 4 480°/s Joint 5 550°/s Joint 6 800°/s Controller model inCube 10/20 - AIR6L-A can keep high performance under the harsh environment full of


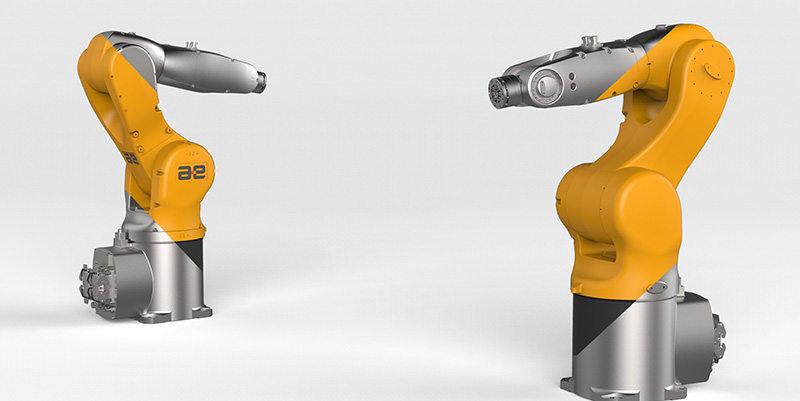
AIR10-A
-
High speed, High precision, High stability, Wrist IP67, High-protection, Compact design
- Superior moving speed, position repeatability up to ±0.02mm.
- AIR10-A is mainly used in loading unloading, grinding polishing,
welding and other operations in harsh environment, as well as handling,
palletizing and other operations with shorter cycle time demands.
Axis No. 6 AXIS Max. payload 10kg Arm reach 1420mm Weight 150kg Position repeatibility +/-0.02mm IP Class IP65 Joint working range Joint 1 -170°/+170° Joint 2 -100°/+135° Joint 3 -120°/+156° Joint 4 -200°/+200° Joint 5 -135°/+135° Joint 6 -360°/+360° Joint speed Joint 1 380°/s Joint 2 350°/s Joint 3 460°/s Joint 4 480°/s Joint 5 550°/s Joint 6 800°/s Controller model inCube 10/20


AIR20-A
-
High speed, High precision, High stability, Wrist IP67, High protection, Compact design
- Strong, Durable, and easy to install and maintain.
- Superior moving speed, Position repeatability up to ±0.03mm.
- AIR20-A is mainly used in loading & unloading, handling, palletizing,
injection molding, packing, dispensing, etc.
Axis No. 6 AXIS Max. payload 20kg Arm reach 1702mm Weight 260kg Position repeatibility +/-0.03mm IP Class IP54(Wrist:IP67) Joint working range Joint 1 -170°/+170° Joint 2 -95°/+155° Joint 3 -95°/+170° Joint 4 -185°/+185° Joint 5 -135°/+135° Joint 6 -400°/+400° Joint speed Joint 1 175°/s Joint 2 175°/s Joint 3 170°/s Joint 4 355°/s Joint 5 355°/s Joint 6 600°/s Controller model inCube 12


AIR50-A
-
High speed, High precision, High stability, High rigidity, lightweight body, Wrist IP67
- Reliable and stable, the optimized overall design reduces the parts wear
rate, and extends the service life. - AIR50-A is mainly used in handling, palletizing, loading & unloading,
deburring, cutting, etc.
Axis No. 6 AXIS Max. payload 50kg Arm reach 2238mm Weight 550kg Position repeatibility +/-0.06mm IP Class IP54(Wrist:IP67) Joint working range Joint 1 -170°/+170° Joint 2 -35°/+145° Joint 3 -120°/+170° Joint 4 -350°/+350° Joint 5 -120°/+120° Joint 6 -360°/+360° Joint speed Joint 1 180°/s Joint 2 180°/s Joint 3 180°/s Joint 4 260°/s Joint 5 255°/s Joint 6 370°/s Controller model ARC4-50 - Reliable and stable, the optimized overall design reduces the parts wear


AIR165-A
-
High speed, High precision, High stability, Spot welding manipulator, Slim wrist
- AIR165-A is capable of continuous spot welding and short-distance rapid
displacement, and can achieve fast movement of 50mm displacement
within 0.5s. - AIR165-A has a slim wrist which is very suitable for spot welding in the
body compartment. - AIR165-A is equipped with dress package, which makes the welding
cable and hose (water/gas) closely attached to the robot body, effectively
reduces space interference, cable wear and splashing damage, very
suitable for automobile spot welding with high movement complexity.
Axis No. 6 AXIS Max. payload 165kg Arm reach 2750mm Weight 1200kg Position repeatibility +/-0.1mm IP Class IP65 Joint working range Joint 1 -170°/+170° Joint 2 -60°/+85° Joint 3 -120°/+155° Joint 4 -360°/+360° Joint 5 -125°/+125° Joint 6 -360°/+360° Joint speed Joint 1 125°/s Joint 2 113°/s Joint 3 125°/s Joint 4 180°/s Joint 5 175°/s Joint 6 280°/s Controller model ARC4-165 - AIR165-A is capable of continuous spot welding and short-distance rapid
AIR6ARC-A
-
High speed, High precision, High stability, Compact and hollow arm
- More suitable for narrow space operation.
- AIR6ARC-A is developed for welding applications in civil and industrial
fields, mainly used in the fields of hardware tools, metal furniture,
automobile maintenance, construction, shipbuilding, pipe engineering,
general machinery, also can be used in handling, palletizing, loading &
unloading.
Axis No. 6 AXIS Max. payload 6kg Arm reach 1450mm Weight 90kg Position repeatibility +/-0.06mm IP Class IP54 Joint working range Joint 1 -170°/+170° Joint 2 -95°/+155° Joint 3 -120°/+180° Joint 4 -155°/+155° Joint 5 -120°/+120° Joint 6 -360°/+360° Joint speed Joint 1 230°/s Joint 2 230°/s Joint 3 230°/s Joint 4 430°/s Joint 5 430°/s Joint 6 630°/s Controller model inCube20
Applications


Welding

Bending
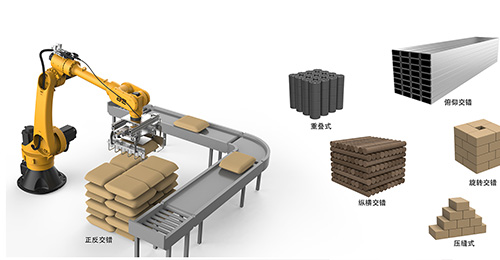
Palletizing
Polishing
Gripper
Glueing
Collaborative Robot

- CA&R Technology offers a comprehensive range of industrial collaborative robots to execute machine tending, circuit board...

Universal Robot UR3 3KG Payload In Good Price
- The UR3 universal robot The smallest member of the UR family,the UR3 table-top robot is the perfect choice for light assembly tasks and jobs that call for absolute precision with 360 degree rotation on all wrist joints and infinite rotation on the ned joint, the UR3 is the most flexible, verstile and collaborative robot on the market today
Repeatability +/-0.1mm Temperature range 0~50 degree Power consumption Min 90watt, typical 125watt,Max 250watt Collaboration operation EN ISO 13849:2008 PLd
EN ISO 10218-1:2011,Clause 5.4.3Specification Payload 3kg/6.6lbs Reach 500mm/19.7in Degrees of freedom 6 rotation joint Programming Polyscope graphical user interface on 12 inch touch screen with mounting Feature IP Classification IP54 Noise <65dB Robot mounting Any Digital input 2Channel Digtial output 2Channel Analog input 2Channel I/O Power supply 12V/24V 600mA in tool Pootprint 128mm Material Alumunium, PP plastics Tool connector type M8 Cable length 6meter Weight 11kg
UR5 Collaborative Robot 6-Axis 5kg Cobot Supplier In Good Price Universal Robot
- The UR5 universal robot
The slightly bigger UR5 is ideal ofr automation low-weight processing tasks like picking&placing, and testing, The medium-sized robot is easy to program. fast to set up and just like the other collaborative member of the UR family,offers one of the fastest payback times in the industry.Repeatability +/-0.1mm Temperature range 0~50 degree Power consumption Min 90watt, typical 150watt,Max 325watt Collaboration operation EN ISO 13849:2008 PLd
EN ISO 10218-1:2011,Clause 5.4.3Specification Payload 5kg/11lbs Reach 850mm/3.35inch Degrees of freedom 6 rotation joint Programming Polyscope graphical user interface on 12 inch touch screen with mounting Feature IP Classification IP54 Noise cOMPARATIVELY NOISELESS Robot mounting Any Digital input 2Channel Digtial output 2Channel Analog input 2Channel I/O Power supply 12V/24V 600mA in tool Pootprint 149mm Material Alumunium, PP plastics Tool connector type M8 Cable length 6meter Weight 18.4kg
UR10 Collaborative Robot 6-Axis 10kg In Good Price Universal Robot
- The UR10 universal robot
While the largest robot arm in the UR family and the one with the most muscle power ,the UR10 does not cmopromise on precision. the collaborative robot arm will automate heavier-weight process tasks with payload requirements of up to 10kgRepeatability +/-0.1mm Temperature range 0~50 degree Power consumption Min 90watt, typical 125watt,Max 250watt Collaboration operation EN ISO 13849:2008 PLd
EN ISO 10218-1:2011,Clause 5.4.3Specification Payload 10kg/22 lbs Reach 1200mm/51.2in Degrees of freedom 6 rotation joint Programming Polyscope graphical user interface on 12 inch touch screen with mounting Feature IP Classification IP54 Noise <65dB Robot mounting Any Digital input 2Channel Digtial output 2Channel Analog input 2Channel I/O Power supply 12V/24V 600mA in tool Pootprint 190mm Material Alumunium, PP plastics Tool connector type M8 Cable length 6meter Weight 28.9kg

AUBO-I10 Collaborative Robot
-
AUBO Robotics AUBO-i10 is a Collaborative robot operation industrial robot with certified
safety functions, hand guide operation, and power and force limiting design type robot.
Certifications include: ISO 10218-1:2011 EN 60204-1:2006 + A1:2009 ISO 12100: 2010 ISO 13849-1:2008 CE, TUV, KCs and NRTACRobot arm specification Max. Load 10kg Arm reach 1350mm Weight/load <4.8 DOF 6 Repeatibility +/-0.05mm Weight 42kg End speed <=4m/s Communication CANbus Cable length 5 meter Power supply DC48V Power 200watt Material Aluminum alloy Working Tem 0~45° Humidity 30~85% IP Class IP54 Axis range/Max. speed J1 +/-175° 150°/s Tool end I/O DI 2 Channel J2 +/-175° 150°/s DO 2 Channel J3 +/-175° 150°/s AI 2 Channel J4 +/-175° 180°/s AO N/A J5 +/-175° 180°/s Voltage 12V or 24V J6 +/-175° 180°/s Current 1A

AUBO-I7 Collaborative Robot
-
AUBO Robotics AUBO-i7 is a Collaborative robot operation industrial robot with certified
safety functions, hand guide operation, and power and force limiting design type robot.
Certifications include: ISO 10218-1:2011 EN 60204-1:2006 + A1:2009 ISO 12100: 2010 ISO 13849-1:2008 CE, TUV, KCs and NRTACRobot arm specification Max. Load 7kg Arm reach 1122mm Weight/load <4.8 DOF 6 Repeatibility +/-0.05mm Weight 32kg End speed <=3.5m/s Communication CANbus Cable length 5 meter Power supply DC48V Power 200watt Material Aluminum alloy Working Tem 0~45° Humidity 30~85% IP Class IP54 Axis range/Max. speed J1 +/-175° 150°/s Tool end I/O DI 2 Channel J2 +/-175° 150°/s DO 2 Channel J3 +/-175° 150°/s AI 2 Channel J4 +/-175° 180°/s AO N/A J5 +/-175° 180°/s Voltage 12V or 24V J6 +/-175° 180°/s Current 1A

AUBO-I3 Collaborative Robot
-
AUBO Robotics AUBO-i3 is a Collaborative operation industrial robot with certified safety functions, hand guide operation, and power and force limiting design type robot.
Certifications include: ISO 10218-1:2011 EN 60204-1:2006 + A1:2009 ISO 12100: 2010 ISO 13849-1:2008 CE, TUV, KCs and NRTACRobot arm specification Max. Load 3kg Arm reach 600mm Weight/load <4.8 DOF 6 Repeatibility +/-0.03mm Weight 14.5kg End speed <1.8m/s Communication CANbus Cable length 5 meter Power supply DC48V Power 200watt Material Aluminum alloy Working Tem 0~45° Humidity 30~85% IP Class IP54 Axis range/Max. speed J1 +/-175° 150°/s Tool end I/O DI 2 Channel J2 +/-175° 150°/s DO 2 Channel J3 +/-175° 150°/s AI 2 Channel J4 +/-175° 180°/s AO N/A J5 +/-175° 180°/s Voltage 12V or 24V J6 +/-175° 180°/s Current 1A

AUBO-I5 Collaborative Robot
-
AUBO Robotics AUBO-i5 is a Collaborative operation industrial robot with certified safety functions, hand guide operation, and power and force limiting design type robot.
Certifications include: · ISO 10218-1:2011 · EN 60204-1:2006 + A1:2009 · ISO 12100: 2010 · ISO 13849-1:2008 · CE, TUV, KCs and NRTACRobot arm Max. Load 5kg Arm reach 924mm Weight/load <4.8 DOF 6 Repeatibility +/-0.05mm Weight 24kg End speed <=2.8m/s Communication CANbus Cable length 5 meter Power supply DC48V Power 200watt Material Aluminum alloy Working Tem 0~45° Humidity 30~85% IP Class IP54 Axis range/Max. speed J1 +/-175° 150°/s Tool end I/O DI 2 Channel J2 +/-175° 150°/s DO 2 Channel J3 +/-175° 150°/s AI 2 Channel J4 +/-175° 180°/s AO N/A J5 +/-175° 180°/s Voltage 12V or 24V J6 +/-175° 180°/s Current 1A
ESTUN Robot
- China made top one brand ESTUN robot in good price,it made scara robot up to 1000mm and max. 20kg payload, 6-axis industrial..

ESTUN Robot ER6-730MI
-
Spec. of robot bodyModel ER6-730-MI Axis No. 6-axis Max. payload 6kg J1 range +/-170° J2 range -80°~+130° J3 range -190°~+65° J4 range +/-170° J5 range +/-130° J6 range +/-360° J1 max. speed 450°/s J2 max. speed 314°/s J3 max. speed 370°/s J4 max. speed 450°/s J5 max. speed 473°/s J6 max. speed 588°/s Repeatibility +/-0.02mm IO interface 24 input and 24 output User air pipe F6*2 and F4*4 Install on floor and ceilling IP Class IP65 Weight 50kg

ESTUN Robot ER10-900MI
Spec. of robot bodyModel ER10-900MI ER10-900MI/3 ER10-900MI/4 Axis No. 6-axis 3-axis 4-axis Max. payload 10kg 10kg 10kg J1 range +/-176° J2 range +/-140° +/-140° +/-140° J3 range -200~+70° -225°~+65° -200°~+70° J4 range +/-173° J5 range +/-130° +/-110° +/-110° J6 range +/-360° +/-360° J1 max. speed 275°/s J2 max. speed 275°/s 250°/s 250°/s J3 max. speed 235°/s 235°/s 235°/s J4 max. speed 400°/s J5 max. speed 400°/s 430°/s J6 max. speed 530°/s 400°/s Repeatibility +/-0.05mm 530°/s IO interface 24 input and 24 output 24 input and 24 output 24 input and 24 output User air pipe F6*2 and F4*4 F6*2 and F4*4 F6*2 and F4*4 Install on floor and ceilling on floor and ceilling on floor and ceilling IP Class IP54 IP54 IP54 Weight 75kg 50kg 52kg

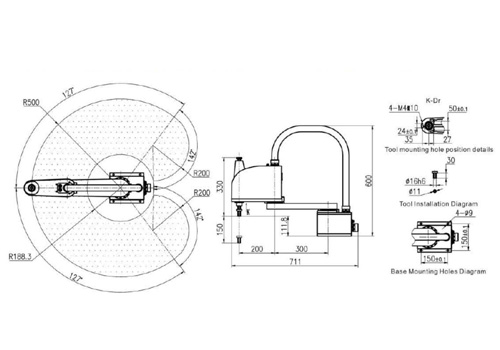
ESTUN Robot ER6-1450H
Spec. of robot bodyModel ER10-1450H Axis No. 6-axis Max. payload 6kg Arm reach 1450mm Repeatibility +/-0.08mm J1 range +/-170 degree J2 range -60~160 degree J3 range -155~85 degree J4 range +/-170 degree J5 range +/-180 degree J6 range +/-360 degree J1 max. speed 180 degree/s J2 max speed 180 degree/s J3 max speed 180 degree/s J4 max. speed 440 degree/s J5 max speed 400 degree/s J6 max speed 600 degree/s Weigth 155kg Install on floor IP Class IP54

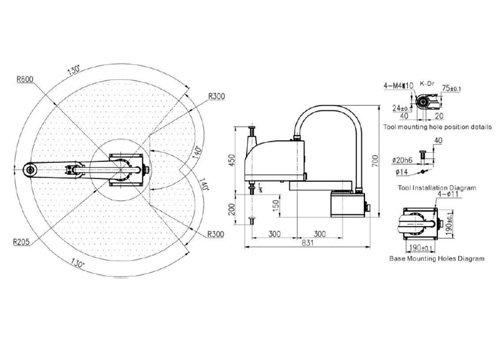
ESTUN Robot ER6-1600H
ESTUN robot specificationModel ER6-1600H Axis No. 6-axis Max. payload 6kg Arm reach 1600mm Repeatibility +/-0.08mm J1 range +/-180 degree J2 range -60~140 degree J3 range -155~80 degree J4 range +/-170 degree J5 range +/-180 degree J6 range +/-360 degree J1 max. speed 148 degree/s J2 max speed 109 degree/s J3 max speed 214 degree/s J4 max. speed 441 degree/s J5 max speed 580 degree/s J6 max speed 6960 degree/s Weigth 164kg Install on floor IP Class IP54
Mobile Industrial Robots
- China made top three brand mobile industrial robots also call AGV. buy moible industrial robots from online robot shop from...





China Top 3 Mobile Industrial Robots Payload Up To 500kg
AGV mobile industrial robots
Trans mobile robots are suitable for the operation of the entry and exit libraries, production line docking, loading and unloading, etc. in the manufacturing and manufacturing fields of automobile manufacturing, home appliance manufacturing, 3C electronics, semiconductor manufacturing, food tobacco, electronic seistwarehouse, etc.
Feature of AGV
Multi-scene applications: Multiple navigation slots to match optimal solutions in different scenarios Youibot 500kg Load Automated Guide Vehicle Agv Similar with Mir
Smart scheduling: The latest generation of composite mobile robot distributed intelligent collaboration system,Supports a variety of navigation options and mixed navigation,Hybrid path planning,Multi-model support,Hybrid scheduling across scenes,Native support for the execution of upper-level tasks and data acquisition of composite robots
High flexibility: Available in 50kg to 500kg multi-size load products,Implement load requirements in multiple scenarios,Mobile platform with rollers,robot arm,Fork-picking accessories,Easy for a wide range of applications with the same chassis.
Power stability: Run speed up to 1-1.2m/s,Repeated positioning accuracy up to up to 10mm,Autonomous charging system guarantees 24-hour non-stop operation

China Top 3 Mobile Industrial Robots Payload Up To 200kg
AGV mobile industrial robots
Trans mobile robots are suitable for the operation of the entry and exit libraries, production line docking, loading and unloading, etc. in the manufacturing and manufacturing fields of automobile manufacturing, home appliance manufacturing, 3C electronics, semiconductor manufacturing, food tobacco, electronic seistwarehouse, etc.
Feature of AGV
Multi-scene applications: Multiple navigation slots to match optimal solutions in different scenarios Youibot 500kg Load Automated Guide Vehicle Agv Similar with Mir
Smart scheduling: The latest generation of composite mobile robot distributed intelligent collaboration system,Supports a variety of navigation options and mixed navigation,Hybrid path planning,Multi-model support,Hybrid scheduling across scenes,Native support for the execution of upper-level tasks and data acquisition of composite robots
High flexibility: Available in 50kg to 500kg multi-size load products,Implement load requirements in multiple scenarios,Mobile platform with rollers,robot arm,Fork-picking accessories,Easy for a wide range of applications with the same chassis.
Power stability: Run speed up to 1-1.2m/s,Repeated positioning accuracy up to up to 10mm,Autonomous charging system guarantees 24-hour non-stop operation



Youibot Corgi 50kg Load Mobile Industrial Robots Agv In Good Price
Corgi mobile robot suture sits for light cargo handling in 3C electronics, e-commerce warehousing, food and tobacco industries, and can be used for indoor security inspections such as factories and warehouses with a cloud head and a robotic arm.
Multi-scene applications: Multiple navigation slots to match optimal solutions in different scenarios
Smart scheduling: The latest generation of composite mobile robot distributed intelligent collaboration system, supports a variety of navigation and hybrid navigation, hybrid path planning, support multi-model, cross-scene hybrid scheduling, native support for composite robot upper task execution and data acquisition;
High flexibility: Compact, easy free movement in 60cm ultra-narrow channels
Autonomous charging: Autonomous charging system guarantees 24-hour non-stop operation
Quick power change: 30 seconds easy battery replacement, long-term operation without downtime;
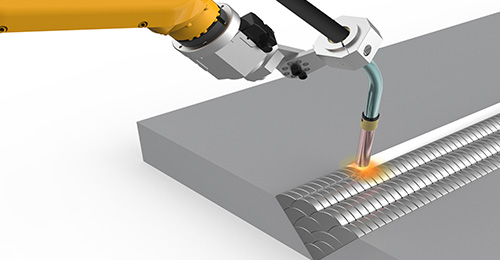
Welding robot
- We Offer the Highest Quality Welding Robots and have also specialized in arc welding, material removal and material handling...
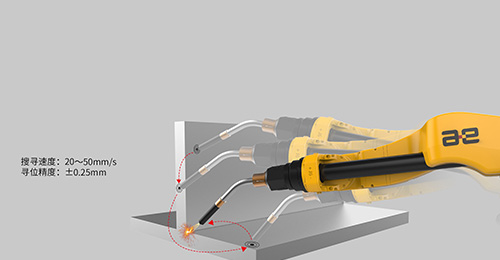
China Welding Robot Manufactures With 350A Welding Source
- This welding robot is R&D for welding application.it fit MEGMEET brand MIG welding equipments. High cost effective welding robot is your best choice
Name HY-1006A-144 HY-1006A-180 Structure Vertically Articulated,6 degrees of Freedom Application Welding Payload 6KG Position Repeatability ±0.08mm Power Capactity 1.7KVA 3.7KVA Range of Motion P-Point see blow Robot Weight 170KG 300KG Range of Motion Basic
AxisJ1 ±170° J2 +178° -65° +0° +175° J3 °+82 -68° +90° -80° Arm Axis J4 ±150° ±170° J5 +22° -202° +125° -90° J6 ±330°(Remarks 1) ±220° Maximum
SpeedBasic
AxisJ1 119°/S 136°/S J2 136°/S 135°/S J3 137°/S 125°/S Arm Axis J4 160°/S 150°/S J5 156°/S 150°/S J6 346°/S 333°/S Mounting Positions Ground and Ceiling and Portal and Wall Ambient Temperature 0-45°,20-80%RH (No condensation) Protection Class Comparable to IP67
Delta robot
-
Buy Delta robots from A&R Technology which are cost-effective and lightweight modular system for delta robots from the best...
Delta Robot features:
Delta robot are typical spatial three-DOF parallel mechanism, the overall structure is precise and compact. Drive parts are distributed in a fixed platform, it is of the following characteristics. High carring capacity and rigidity,small self-loading ratio,good dynamic performance; DOF parallel manipulator structure, high accuracy of repeated positioning ; Ultra-high speed pick up items, one second multiple cycles.DELTA Robot spec. Model AR -500D AR-600D AR-800D AR -1000D Control axis number Three axes, Four axis Rated load 1KG 1KG 3KG 5KG Working range X=500mm
y=150mmX=600mm
y=200mmX=800mm
y=250mmX=1000mm
y=300mm
F=1040mmRobot weight 30KG 67KG 67KG 67KG Repetition accuracy ±0.1mm Installation mode Suspension Electrical control system WSC-GJK2-T4 Maximum operating speed 0.4/ (x=400mm y=50mm) / 0.4 S/beat (x=400mm y=50mm) Driving mode Ac / Ac servo drive Motion instruction PTP,LINE,PICK ,PLACE Interface 7 / 7-Inch teaching apparatus Visual positioning module (130W,,) / Optional(130W camera, add-on lens, light source)



3/4axis Delta Robot 3kg Payload 800mm Working Diameter For Packing Application
- Model: AR-800D
Brand: A&R Price: 0 Unit: SET Minorder: 1 Payment: T/T in advance Port: Shenzhen Port Place: China Packaging: wood box

3/4axis Delta Robot 5kg Payload 1000mm Working Diameter For Packing Application
- Model: AR-1000D
Brand: A&R Price: 0 Unit: SET Minorder: 1 Payment: T/T in advance Port: Shenzhen Port Place: China Packaging: wood box

3/4axis Delta Robot 1kg Payload 500mm Working Diameter For Packing Application
- Model: AR-500D
Brand: A&R Price: 0 Unit: SET Minorder: 1 Payment: T/T in advance Port: Shenzhen Port Place: China Packaging: wood box
Scara Robot
China Hotsale 4-Axis Scara Robot,5kg Payload 600mm Arm Reach
Price: 4500 Unit: USD Minorder: 1 Payment: T/T Port: Shenzhen Certification: CE Place: China
ADTECH 4-Axis 2kg Payload Scara Robot With 300mm Arm Reach
- Model: AR3215
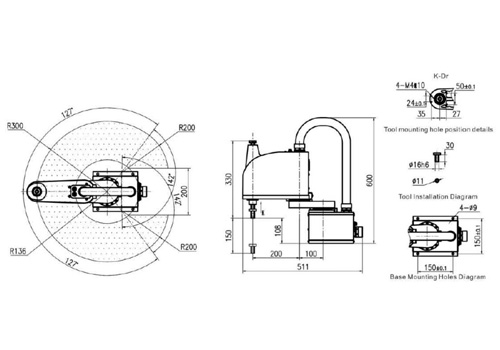
AR3215 is a high response 4-axis scara robot and rated 2kg payload upto 5kg payload max. with 300mm arm reach.Its repeatibility only 0.01mm. This robot build Japan panasonic servo motor and Japan Harmonic Drive gearbox also Japan THK ball screw. The accuracny and stable is enough for high performance application. such as Automobile industry, semiconductor industry and electronics industry.The popular application is pick&place, assembly,screw driving, vision dection. dynamic pick&place at conyver.That is your best selectionAxis paramter X-axis Arm reach 100mm Rotation range +/-127° Y-axis Arm reach 200mm Rotation range +/-142° Z-axis Travel 150mm R-axis Rotation range +/-360° Max. speed X-axis 600°/s Y-axis 600°/s X,Y-axis Synthesis 5.2m/s Z-axis 1.3m/s R-axis 1667°/s Repeatibility X,Y axis +/-0.01mm Z axis +/-0.01mm R axis +/-0.005° R axis allowed inertia(Rated/Max.) 0.005kg.m^2/ 0.035kg.m^2 Weight 14.1kg
ADTECH 4-Axis 2kg Payload Scara Robot With 400mm Arm Reach
- Model: AR4215
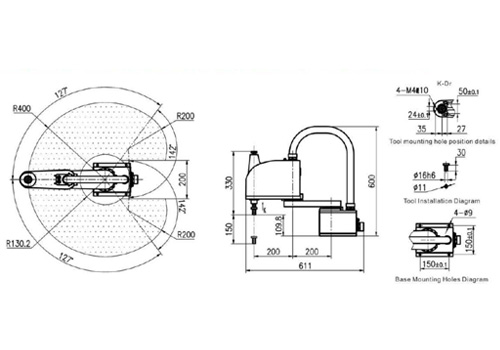
AR4215 is a high response 4-axis scara robot and rated 2kg payload upto 5kg payload max. with 400mm arm reach.Its repeatibility only 0.01mm. This robot build Japan panasonic servo motor and Japan Harmonic Drive gearbox also Japan THK ball screw. The accuracny and stable is enough for high performance application. such as Automobile industry, semiconductor industry and electronics industry.The popular application is pick&place, assembly,screw driving, vision dection. dynamic pick&place at conyver.That is your best selectionAxis paramter X-axis Arm reach 200mm Rotation range +/-127° Y-axis Arm reach 200mm Rotation range +/-142° Z-axis Travel 150mm R-axis Rotation range +/-360° Max. speed X-axis 600°/s Y-axis 600°/s X,Y-axis Synthesis 6.3m/s Z-axis 1.3m/s R-axis 1667°/s Repeatibility X,Y axis +/-0.01mm Z axis +/-0.01mm R axis +/-0.005° R axis allowed inertia(Rated/Max.) 0.005kg.m^2/ 0.035kg.m^2 Weight 13.3kg
ADTECH 4-Axis 2kg Payload Scara Robot With 500mm Arm Reach
- Model: AR5215
AR5215 is a high response 4-axis scara robot and rated 2kg payload upto 5kg payload max. with 500mm arm reach.Its repeatibility only 0.01mm. This robot build Japan panasonic servo motor and Japan Harmonic Drive gearbox also Japan THK ball screw. The accuracny and stable is enough for high performance application. such as Automobile industry, semiconductor industry and electronics industry.The popular application is pick&place, assembly,screw driving, vision dection. dynamic pick&place at conyver.That is your best selectionAxis paramter X-axis Arm reach 300mm Rotation range +/-127° Y-axis Arm reach 200mm Rotation range +/-142° Z-axis Travel 150mm R-axis Rotation range +/-360° Max. speed X-axis 600°/s Y-axis 600°/s X,Y-axis Synthesis 7.3m/s Z-axis 1.3m/s R-axis 1667°/s Repeatibility X,Y axis +/-0.01mm Z axis +/-0.01mm R axis +/-0.005° R axis allowed inertia(Rated/Max.) 0.005kg.m^2/ 0.035kg.m^2 Weight 13.6kg

ADTECH 4-Axis 2kg Payload Scara Robot With 550mm Arm Reach
- Model: FR5215
FR5215 Is A High Response 4-Axis Scara Robot And Rated 2kg Payload Upto 5kg Payload Max. With 550mm Arm Reach.The Most Feature Of The Robot Is Mount On CeilingIts Repeatibility Only 0.025mm. This Robot Build Japan Panasonic Servo Motor And Japan Harmonic Drive Gearbox Also Japan THK Ball Screw. The Accuracny And Stable Is Enough For High Performance Application. Such As Automobile Industry, Semiconductor Industry And Electronics Industry.The Popular Application Is Pick&Place, Assembly,Screw Driving, Vision Dection. Dynamic Pick&Place At Conyver.That Is Your Best SelectionAxis paramter X-axis Arm reach 250mm Rotation range +/-360° Y-axis Arm reach 300mm Rotation range +/-360° Z-axis Travel 150mm R-axis Rotation range +/-360° Max. speed X-axis 517.6°/s Y-axis 374.3°/s X,Y-axis Synthesis 6.9m/s Z-axis 1.3m/s R-axis 1667°/s Repeatibility X,Y axis +/-0.025mm Z axis +/-0.01mm R axis +/-0.005° R axis allowed inertia(Rated/Max.) 0.005kg.m^2/ 0.035kg.m^2 Weight 21kg
ADTECH 4-Axis 1kg Payload Scara Robot With 600mm Arm Reach
- Model: FR6115
FR6115 Is A High Response 4-Axis Scara Robot And Rated 1kg Payload Upto 3kg Payload Max. With 600mm Arm Reach.The Most Feature Of The Robot Is Mount On CeilingIts Repeatibility Only 0.025mm. This Robot Build Japan Panasonic Servo Motor And Japan Harmonic Drive Gearbox Also Japan THK Ball Screw. The Accuracny And Stable Is Enough For High Performance Application. Such As Automobile Industry, Semiconductor Industry And Electronics Industry.The Popular Application Is Pick&Place, Assembly,Screw Driving, Vision Dection. Dynamic Pick&Place At Conyver.That Is Your Best SelectionAxis paramter X-axis Arm reach 300mm Rotation range +/-360° Y-axis Arm reach 300mm Rotation range +/-360° Z-axis Travel 150mm R-axis Rotation range +/-360° Max. speed X-axis 517.6°/s Y-axis 374.3°/s X,Y-axis Synthesis 7.4m/s Z-axis 1.3m/s R-axis 1667°/s Repeatibility X,Y axis +/-0.025mm Z axis +/-0.01mm R axis +/-0.005° R axis allowed inertia(Rated/Max.) 0.005kg.m^2/ 0.035kg.m^2 Weight 21kg
ADTECH 4-Axis 5kg Payload Scara Robot With 600mm Arm Reach
- Model: AR6520
AR6520 is a high response 4-axis scara robot and rated 5kg payload upto 10kg payload max. with 600mm arm reach.Its repeatibility only 0.015mm. This robot build Japan panasonic servo motor and Japan Harmonic Drive gearbox also Japan THK ball screw. The accuracny and stable is enough for high performance application. such as Automobile industry, semiconductor industry and electronics industry.The popular application is pick&place, assembly,screw driving, vision dection. dynamic pick&place at conyver.That is your best selectionAxis paramter X-axis Arm reach 300mm Rotation range +/-130° Y-axis Arm reach 300mm Rotation range +/-140° Z-axis Travel 200mm R-axis Rotation range +/-360° Max. speed X-axis 375°/s Y-axis 600°/s X,Y-axis Synthesis 7.1m/s Z-axis 1.1m/s R-axis 1500°/s Repeatibility X,Y axis +/-0.015mm Z axis +/-0.01mm R axis +/-0.005° R axis allowed inertia(Rated/Max.) 0.05kg.m^2/ 0.2kg.m^2 Weight 24.3kg


4-Axis Scara Robot And 6-Axis Industrial Robot
- Model: TS6-600
TS6-600 is high cost-effective 4-axis scara robot with 5kg payload and 600mm arm reach. The repeatability is up to +/-0.01mm. This scara robot can be application for pick&place, assembly ,vision detection etc.Model TS6-600 Arm reach 600mm Payload (Max) 5kg(6kg) Maxload 6kg Working area X +/-125° Y +/-125° Z 0-150/0-230mm R +/-360° Repeatiblity X+Y +/-0.01mm Z +/-0.01mm R +/-0.005° Max. Speed X 375°/s Y 600°/s Z 833mm/s R 1500°/s User wire 0.2*5 User pipe F6*2 Weight 20kg Protection grade IP21 Mount Ground Temperature 5~40° Humidity 10~80% Digital I/O 8/8 channel
Electric Gripper
- Electric Gripper .It can control clamping force adjustable and stroke adjustable. A very high cost effective electric gripper....


DH Electric Gripper Similar With Onrobot Electric Gripper
- Spec. of Electric gripper
Mechanical spec. Stroke(Programmable) 0~95mm Grip force(Programmable) 10~80n Max. payload(standard finger tip) 8kg Max. closing speed 120mm/s Gripper mass 0.93kg Kinematics Parrallel/Adaptive Repeatibility 0.03mm Electrical,Communication spec. Communication protocol TCP/IP, EtherCAT, USB2.0 Power supply 24VDC Integration Plug7Play for cobot,support industrial robot and ROS

Electric Gripper Control Clamping Force
- Feature of electric gripper:
Connect 24V Power and ground; send high and low logic levels to control the opening and closing send analog signals to control the clamping force
Spec.
Model EFG-F Total stroke
8mm
Clamping force 5~30N Max clamping weight <=300g Mode of motion Two finger Adjusting of stroke Non- adjustable Weight 0.235kg Closng or opening time 0.3s Dimension 30*24*94 Placement mode of controller Build in controller Power 3.6watt Motor type BLDC Rated voltage 24V Peak current 1A NPN gripper controller input and output voltage is 24V which type is NPN Universal driver Invoked with urcap libraries directly

Electric Gripper Control Open And Closing

Electric Gripper Control Stroke Adjustable
- Feature of electric gripper:
Connect 24V Power and ground; Send pulse signals to control the stroke
Spec.
Model EFG-20 Total stroke
20mm
Clamping force 80N Max clamping weight <=800g Mode of motion Two finger translation Adjusting of stroke adjustable Weight 0.458kg Closng or opening time 0.45s Dimension 44*30*124mm Placement mode of controller Build in controller Power 5 watt Motor type servo Rated voltage 24V Peak current 1A NPN gripper Controller input and outpur voltage is 0 to 5V or 0 to 24V which type is NPN PNP gripper Controller input and outpur voltage is 0 to 24V which type is PNP Universal driver Invoked with urcap libraries directly
Collaborative Scara

4-Axis Collaborative Robot A Better Robot Than Traditional Scara
- Feature of 4-axis collaborative robot scara
Compared with traditional robotics arm This scara is more adapted to process which has a hgh quality with flexibility,touch,and dexterity,that makes the collaboratin cost less and work more efficient Spec.Model Z-Arm 2140C collaborative Basic infomation J1-axis Arm reach 200mm Rotation angle +/-90° J2-axis Arm reach 200mm Rotation angle +/-164° Z-axis Stroke 210mm R-axis Rotation angle +/-1080° Linear velocity 1255.45 Repeatiblity +/-0.03mm Rated payload 2kg Max. Payload 3kg Degree of freedom 4 Power 220V/110V 50~60Hz Adapter to 24VDC Communication Wifi / Ethernet Extensibility To build-in motion controller,provide 10 I/O I/O interface Digtial input 5 channel Digtial output 5 channel Height 558mm Weight 19kg Base installation Overall size 250mm*250mm*10mm Mounting hole 200mm*200mm with 4*M8*25 screw Safety-related monitored stop Avaiable Guide programming Avaiable

4-Axis Huiling Robot A Better Robot Than Traditional Scara
- Feature of 4-axis huiling robot scara
Compared with traditional robotics arm This scara is more adapted to process which has a hgh quality with flexibility,touch,and dexterity,that makes the collaboratin cost less and work more efficient Spec.Model Z-Arm 2140N non-collaborative Basic infomation J1-axis Arm reach 200mm Rotation angle +/-90° J2-axis Arm reach 200mm Rotation angle +/-164° Z-axis Stroke 210mm R-axis Rotation angle +/-1080° Linear velocity 1255.45 Repeatiblity +/-0.03mm Max. Payload 3kg Degree of freedom 4 Power 220V/110V 50~60Hz Adapter to 24VDC Communication Wifi / Ethernet Extensibility To build-in motion controller,provide 10 I/O I/O interface Digtial input 5 channel Digtial output 5 channel Heigh 558mm Weight 19kg Base installation Overall size 250mm*250*10mm Mounting hole 200mm*200mm with 4*M8 25 screw Safety-related monitored stop Not avaiable Guide programming Not avaiable

Z-Arm 1632C Collaborative Robot A Better Robot Than Traditional Scara
- Feature of Z-arm 4-axis collaborative robot scara
Compared with traditional robotics arm This scara is more adapted to process which has a hgh quality with flexibility,touch,and dexterity,that makes the collaboratin cost less and work more efficient Spec.Model Z-Arm 1632C collaborative Basic infomation J1-axis Arm reach 160mm Rotation angle +/-90° J2-axis Arm reach 160mm Rotation angle +/-143° Z-axis Stroke 160mm R-axis Rotation angle +/-1080° Linear velocity 1017mm(0.5kg payload) Repeatiblity +/-0.02mm Rated payload 0.5kg Max. Payload 1kg Degree of freedom 4 Power 220V/110V 50~60Hz Adapter to 24VDC Communication Wifi / Ethernet Extensibility To build-in motion controller,provide 6 I/O I/O interface Digtial input 3 channel Digtial output 3 channel Height 480 mm Weight 19kg Base installation Overall size 200mm*200mm*8mm Mounting hole 160mm*160mm with 4*M5*12 screw Safety-related monitored stop Avaiable Guide programming Avaiable

HITBOT 1632N Collaborative Robot A Better Robot Than Traditional Scara
- Feature of HITBOT 4-axis collaborative robot scara
Compared with traditional robotics arm This scara is more adapted to process which has a hgh quality with flexibility,touch,and dexterity,that makes the collaboratin cost less and work more efficient Spec.Model Z-Arm 1632N collaborative Basic infomation J1-axis Arm reach 160mm Rotation angle +/-90° J2-axis Arm reach 160mm Rotation angle +/-143° Z-axis Stroke 160mm R-axis Rotation angle +/-1080° Linear velocity 1017mm(0.5kg payload) Repeatiblity +/-0.02mm Rated payload 0.5kg Max. Payload 1kg Degree of freedom 4 Power 220V/110V 50~60Hz Adapter to 24VDC Communication Wifi / Ethernet Extensibility To build-in motion controller,provide 6 I/O I/O interface Digtial input 3 channel Digtial output 3 channel Height 480 mm Weight 19kg Base installation Overall size 200mm*200mm*8mm Mounting hole 160mm*160mm with 4*M5*12 screw Safety-related monitored stop Not Avaiable Guide programming Not Avaiable
Welding positioner
- China made welding positioner payload 300kg ,500kg single axis and two axis positioner ,L type positioner and plat type...

2-Axis L Type 500kg Welding Positioner For Welding Robot
- Spec. L type welding positioner
Name Model Payload Rotation radius Max. rotation speed Repeatibility Rotation angle L type welding positioner AUT-DWP-L-500 500kg 400mm J1:50°/s
J2:70°/sJ1:+/-0.12mm
J2:+/-0.15mmJ1:+/-180°
J2+/-360°AUT-DWP-L-1000 1000kg 500mm J1:50°/s
J2:40°/sJ1:+/-0.15mm
J2+/-0.18mmJ1:+/-180°
J2+/-360°AUT-DWP-L-2000 2000kg 600mm J1:50°/s
J2:30°/sJ1+/-0.15mm
J2:+/-0.2mmJ1:+/-180°
J2+/-360°

Single Axis Welding Positioner For Welding Robot
- Spec. of single axis welding positioner for welding robot
Positioner name Single axis welding positioner Postioner model HY4010H-001 HY4030H-001 Rated input voltage 3phase AC 380V 50/60Hz
Servo positioner input 3phase AC200V50/60HzInput voltage range 3phase AC 380v+/-10%
Servo positioner input 3phase AC 200V+/-10%Motor insulation class F F Work table diemension 1800 x 1800mm 2500 X 800mm Recommend welding working range <1800X700X400 <2400 X700 X400 Net weight of positioner 450kg 500kg Max. payload Axis line of load <100kg Axis line of load <300kg Max. rotation speed 148°/s 100°/s Position repeatibility +/-0.1mm +/-0.1mm Stop postion Any where Any where
Machine vision system
- the hot sale machine vision system for robotics dynamic pick&place
Machine vision system
- Model: AVS2300ADTECH machine vision system total include industrial computer, industrial camera,lens,lighting source and lighting controller. It can be application for adtech scara robot dynamic pick&place, defect detecting etc.
Industrial PC CPU:Intel Celeron J1900. 2.0GHz Memory:4GB Hardisk:64GB 4 Channel 1000M Ethernet 2 Channel series port 3 Channel USB 2.0 Build in vision system Industrial camera 130M px 90fps@1280(H) X1024(V) 1/2'' CMOS Pixel size:4.8um X 4.8um Michael size: 29mm X 29mm X 42mm Camera lens Focal length 12mm Min. WD 60mm Max. target surface 1/1.8 Size: 40.8mm X 29.5mm C interface Lighting source White ,24V input Outline size: 600mm X500mm X16mm Lighting size: 550mm X450mm Lighting source controller Input 220V Output 24V


