- Offer Profile
Faisal Zubair Qureshi
Assistant Professor (Computer Science)
Faculty of Science
University of Ontario Institute of Technology (UOIT)Research Interests
Computer Graphics, Computer Vision, Robotics, Sensor Networks:
Behavior-based computer animation, autonomous characters for computer animation and games, autonomous agent architectures, cognitive vision
Teaching
Introduction to Visual Computing (CSC320): Summer 2006, Summer 2007
Computer Graphics (CSC 418): Fall 2004
Space Robotics
Intelligent Perception and Control for Space Robotics: Autonomous Satellite Rendezvous and Docking
- Background
The work presented here was done as part of the ROSA (Remote Operation with Supervised Autonomy) project at MacDonald Dettwiler Space and Advanced Robotics Limited (then called MDRobotics, now MDA Corporation). MDRobotics is a Canadian company that specializes in space missions, and that has been supporting human space flight since early 1980s through advanced robotic systems, such as Space Shuttle's Canadarm and Mobile Servicing System for the International Space Station. Other partners included National Research Council of Canada--Institute for Information Technology (NRC-IIT), and Canadian Space Agency (CSA), and the University of Toronto and Saikl technologies (through MDRobotics). The project was funded in part by Precarn Inc.
On-orbit satellite servicing
On-orbit satellite servicing is the task of maintaining and repairing a satellite in orbit.- It extends the operational life of the satellite
- Mitigates technical risks
- Reduces on-orbit losses
- Helps manage orbital debris
As early as the 1980s, the National Aeronautics and Space Administration realized the importance of on-orbit servicing for protecting their assets in space.
The Need for Autonomy
Currently, on-orbit satellite servicing operations are carried out manually; i.e., by an astronaut. However, manned missions are usually very costly and there are human safety concerns. Furthermore, it is currently impracticable to carry out manned on-orbit servicing missions for satellites in geosynchronous equatorial orbit (GEO), as the space shuttle can not reach them. Unmanned, tele-operated, ground-controlled missions are infeasible due to communications delays, intermittence, and limited bandwidth between the ground and the servicer. A viable alternative is to develop the capability of autonomous on-orbit satellite servicing.
Autonomy entails that the on-board controller be capable of estimating and tracking the pose (position and orientation) of the target satellite and guiding the robotic manipulator as it 1) approaches the
satellite, 2) maneuvers itself to get into docking position, and 3) docks with the satellite. The controller should also be able to handle anomalous situations, which might arise during an AR&D operation, without jeopardizing its own safety or that of the satellite.
Solution: Cognitive Controller (CoCo) Architecture
We proposed CoCo architecture that combines an ethologically-inspired, reactive module with a deliberative unit to automatically capture a non-cooperative, free-flying satellite using only computer vision.
Autonomous satellite capture controller developed in ROSA is the first of its kind. Other satellite capture controllers typically require other sensing modalities, such as GPS, radar, and laser range finders, and assume a cooperative target satellite.
Besides, to the best of our knowledge, it is the only satellite capture controller capable of deliberative activity to resolve anomalous situations. Rosa is a large research effort and it uses target satellite pose estimation and servo routines developed by other partners.Success Stories
Rosa helped Boeing win the 12 million dollars Orbital Express contract!Demonstrations
The demonstration system exhibited robust completion of goal in spite of repeated induced 'failures'.
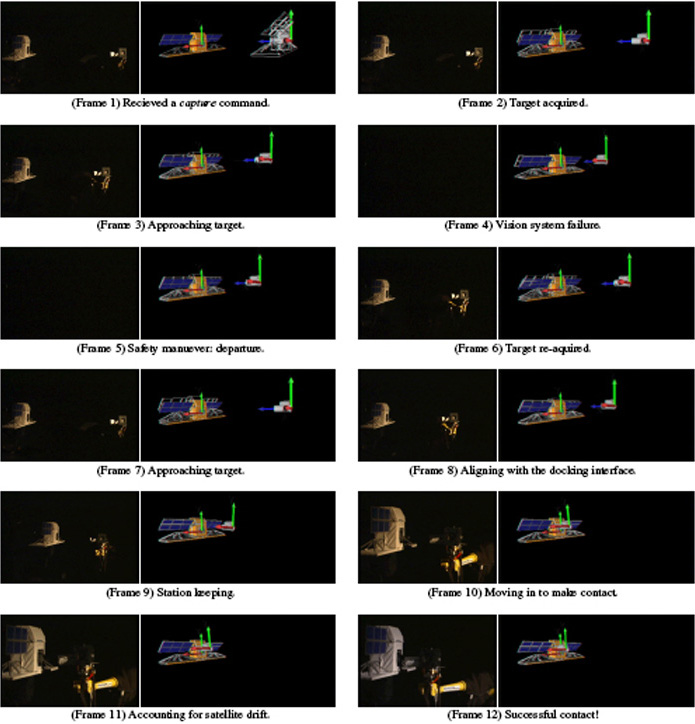
The following demos shows the CoCo-controlled robotic arm capturing a free-flying satellite. The capture procedure is initiated by a single high-level command from the ground station. Upon receiving the command, the system initializes the long-range vision module to commence a visual search procedure. Once the satellite is found, and its identity confirmed, the systems guides the robotic arm to move closer to the satellite. The performance of the long-range vision module deteriorates as the separation between the robotic arm and the satellite becomes smaller; this is due to the fact that the cameras are mounted on top of the end-effector. The cognitive vision system, therefore, turns on the medium range vision module. The long-range vision processing is turned off (to conserve the power consumption) once the medium range system is fully initialized and is "reliably" tracking the satellite. At this stage the robotic is arm tries to match satellite's linear and angular velocities, a procedure known is station keeping. Short-range vision processing is initiated, and a message is sent to the ground station to turn off the satellite's attitude control system. The robotic arm should not capture a satellite whose attitude control system is functioning, as that might destroy the satellite, or the robotic arm, or both. When the attitude control system is not active, the satellite begins to drift; however, the robotic arm still follows it by relying upon the short-range vision system. Upon receiving a confirmation from the ground station that the attitude control system is off, the robotic arm goes in for the kill.
When there is an error, such as a vision system failure, the reactive system responds immediately and tries to increase its separation from the satellite. In the absence any new perceptual information, the system relies upon its time-aware and context-sensitive mental state. Meanwhile, the deliberation module is using its knowledge base to 1) explain the error and 2) suggest a recovery.
In the videos (at top), the inlay shows the view from Autonomous Agent Design & Simulation Testbed---a software framework for designing cognitive vision systems. The wireframe represents the position of the satellite as estimated by the robotic arm. Notice, the estimated position of the satellite is more accurate when the satellite is closer to the robotic arm. Furthermore, the estimated position is maintained when no new perceptual information is available.Stills
In the following figure despite a simulated vision system failure, the servicer robot captures the satellite using vision by making use of its cognitive abilities. On the right of each frame, we show the view from the simulation environment that runs the controller code. The simulation environment communicates with the physical robots over the network. Here, the wireframe represents the position of the satellite as estimated by the robotic arm. The 3D model of the satellite represents the actual position of the satellite according to the sensors on the Fanuc robot arm. The gray cylinder represents the position of the chaser robot end-effector according to the telemetry information. Note that the estimated position is maintained in the absence new perceptual information (Frame 3 and 4). A vision failure was induced by shutting off the ambient light. Smart Camera
Virtual Vision for Smart Camera Sensor Networks
- Background
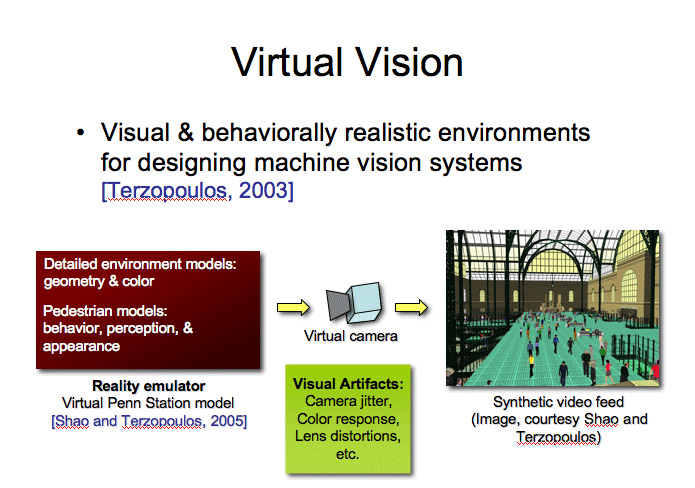
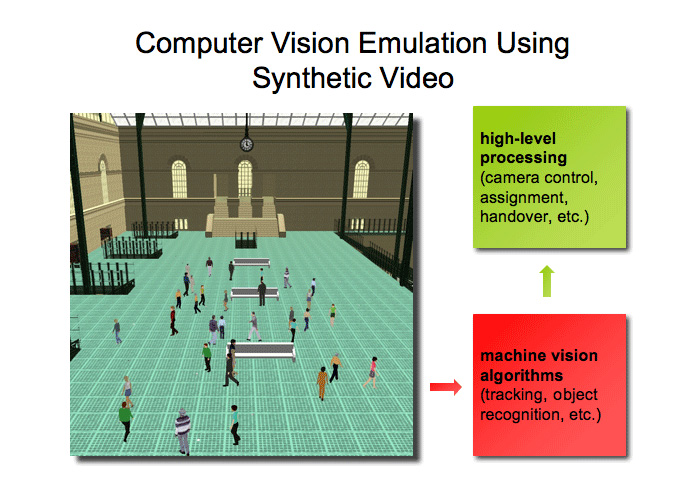
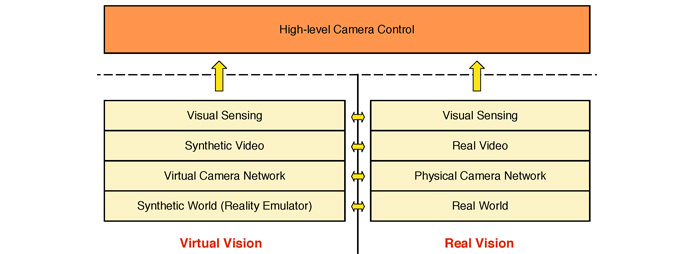
Terzopoulos [1] proposed a Virtual Vision approach to designing surveillance systems using a virtual train station environment populated by fully autonomous, life like pedestrians that perform various activities [2]. Within this environment, virtual cameras generate synthetic video feeds. The video streams emulate those generated by real surveillance cameras, and low-level image processing mimics the performance characteristics of a state-of-the-art surveillance video system.It is an on going project and the related publications are available here.
References
[1] D. Terzopoulos, “Perceptive agents and systems in virtual reality,” in Proc. 10th ACM Symposium on Virtual Reality Software and Technology, (Osaka, Japan), pp.1–3, Oct. 2003.
[2] W. Shao and D.Terzopoulos, “Autonomous pedestrians,” in Proc. ACMSIGGRAPH/Eurographics Symposium on Computer Animation, (LosAngeles, CA), pp. 19–28, July 2005.