- Offer Profile
- Automation & Robotics
IRL’s robotic team is actively pursuing several research projects in automation, principally in the meat, seafood, and other primary industries.
Our interests are to apply advanced automation technology to product handling, processing and sorting to increase efficiency and throughput. In particular, we deal with natural products which are variable in size, shape texture and colour.
Our activities cover the gamut of development from initial concept to production prototype, working with technology partners to deliver viable commercial solutions.
Deck Checker
- Project
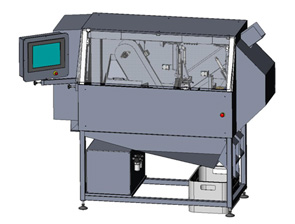
To design and build a high-speed playing card verification machine for use in casinos.
The specification required an input stack of up to 8 decks of randomized cards to be checked for missing or duplicated cards within 2 minutes, with 100% accuracy.
The machine needed to print a verification report after each run.
Innovation
The machine was required to learn the features of any casino’s playing cards, with user-definable deck structure for each of several games.
Our contribution
We designed the mechanical parts required to singulate and transfer cards under the machine’s camera to the output delivery tray.
We designed the internal electrics for the motors and other subsystem components.
We developed the vision software, the user interface and the PLC machine control program.
Several prototypes were constructed and trialled, followed by assembly of 100 units. Then we helped transfer manufacture to the client’s manufacturing facilities. 
- The playing cards for casinos are designed specifically for that house. While each card is easily recognized visually, the number fonts and suit icons vary in style and size. The machine must therefore reject cards from foreign decks.
Lomak Keyboard
- Project
Our task was to complete the firmware and commission a light-operated mouse and keyboard for use by people with limited or no hand function.
We joined the project late in the development cycle. The mechanical and electronics hardware, plastics, and top surface overlay were complete, apart from issues with form and fit.
However, the project was stalled. The embedded microprocessor program needed a lot more development to achieve the desired functionality.
Innovation
The keyboards are novel in design. They are operated by a head-mounted laser which is switched on by a coded infrared signal coming from the keyboard. The keyboards can also be controlled by a handheld pointer.
The firmware can be user-configured to generate international characters used in many countries. To the PC, the keyboards appear as a standard mouse and keyboard and do not need any extra software driver to be loaded.
Our contribution
We completed the software program and assembled and commissioned the first five commercial units. We also wrote an Assembly and Test Procedures manual for the manufacturing company, and the User Guides as an online (web-based) document.
We have subsequently created firmware releases for a variety of international markets, and implemented the Notesai variant with wider spaced keys for cerebral palsy sufferers. 
- The laser pointer can be mounted on a headband or cap. It turns on when it comes in range of the keyboard, and its beam activates sensors on the keyboard.

- The person in the background is using a handpointer to select characters. The one in front is using a headpointer.

- The Lomak keyboard is a Light-Operated Mouse And Keyoard. It is activated by a laser and can be used by a wide variety of disabled people. It can be configured to suit international users.
Y-cutter Robot
- Robots in the sheep
processing industry
Robotic systems are much needed in abattoirs, because- High staff turnover creates a shortage of trained people
- Repetitive physical work has risk of strain injury
- Difficult and unattractive working environment.
The challenge
- Every carcass is different, with variety of breeds, shapes, and sizes
- The variation in wool density and length makes sensing difficult
- Wool is seldom clean, increasing the wear of cutting blades
- The food grade environment requires equipment to withstand high pressure washdown and be resistant to chemical attack.
The “Y-cut” is the term used to describe the first two cuts on a sheep processing line. Sheep are suspended from the chain by the legs, and a cut is performed down the inside of each foreleg, to meet in the middle.
The intelligent Y-cutter- Our Y-cutter robot is the first machine in the world to perform the “Y-cut” automatically.
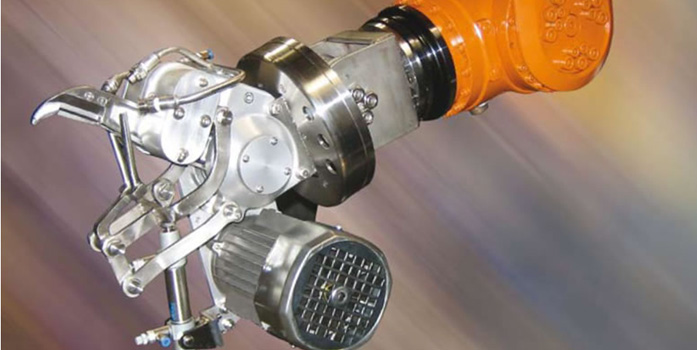
- The key feature is the Y-cutter tool head that is specially designed to cut the pelt without penetrating the skin. It therefore avoids contamination being transferred across to the carcass.
- The machine has sensors to detect the size of each animal and determines the optimum robotic path to perform the “Y-cut” down each foreleg.
- It processes continuously on a moving chain at a throughput of up to 9 carcasses per minute – among the fastest in the world.
Watch how the Y-cutter tool head operates by clicking the above link. This is a simulation used by the design engineers to check how all parts of the tool head operate, before any of the parts are committed to manufacture.

- The Y-cutter tool head is mounted on a robot arm (orange). In the abattoir, the complete robot is protected by an all-enveloping white wash-down shroud.
Gas Depelter
- Sheep pelt removal
- New Zealand lamb is recognised internationally as a premium product but pelts are a commodity item in their own right
- Pelts need to be removed with care to preserve value
- Gas depelting has been proposed as a viable method for future processing.
Advantages of gas depelting
A method that uses compressed gas to separate pelt from carcass- Makes it easier to subsequently remove the pelt
- Improves the quality of the pelt and the carcass
- Reduces the amount of fat adhering to the pelt
- Reduces the opportunity for irreversible stretching of the pelt.
The machine
-
Successfully executes automated gas depelting on both hind-legs simultaneously
-
A critical component is the injection needle which performs a dual function of penetrating the pelt and injecting gas
-
Machine performance is highly dependent on the precise position and orientation of the injection needle that is controlled by a 3DOF manipulator for each leg
-
A built-in cleaning system sanitises the blades after every injection.
Mussel Opener
- The industry need
- Green-lipped mussels are an important part of the seafood industry
- When sold in the half shell, they attract a premium in the export market
- Automating the opening process was identified as a crucial step for improving productivity.
The challenge
- The machine must have a high throughput of 30 mussels per minute
- It needed to be robust, and not damage or degrade the product
- It must be modular to integrate with the existing plant layout and automated equipment.
The machine
- The highly successful concept is now a commercial reality and used in Sanford’s mussel processing plant in Havelock
- A key feature is the vision system that identifies the size and orientation for product verification
- Critical process steps were executed by smart mechanical devices designed to singulate, reorientate and open the product
- Multiple sensors keep each product tracked when it enters the machine.
- An in-built CIP (Clean-In-Place) system ensures hygiene regulations are met.
Vision Guided Robotics
- Robotic bin picking
- The automatic grasping of parts in a bin with the use of a robotic arm is commonly known as robotic bin picking. It is a complex task that is usually carried out by a vision guided robot (VGR).
- Recent developments in VGR have been in the vision technology. Now with low-cost 3D vision, complex issues can be overcome with novel approaches in image processing and analysis.
Our research scenario
Our interests lie in handling non-rigid objects such as fruit, with variable size, shape, firmness and texture.
We have designed a robot gripper tool for grasping a fruit from its sides.
A depth image created from a stereo pair of images from a calibrated camera is processed by a slice analysis algorithm, to identify individual objects.
The pose of each object is obtained from a blob analysis at a specified depth.
Candidate pick points are identified, from which the best is selected and its coordinates are calculated and sent to the robot.
The robot picks up the fruit and transfers it to the delivery point. 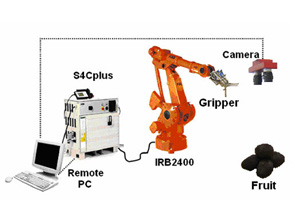
- A robot fitted with a multi-fingered gripper tool is used to grasp fruit from a pile.
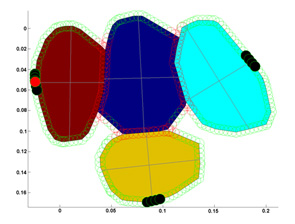
- In this image, the positions of fruit have been identified and their pose has been determined. Suitable pick-up points are shown in black. The final pick point is in red.
Cognitive Mapping Robot Navigation
- Animal behaviour
- When an animal explores a new environment, it does not acquire a precise map of the places visited.
- Research has shown that learning is a recurring process.
- Over time, new information helps the animal to update its perception of the locations it has visited.
- They are still able to use the fuzzy and often incomplete representation to find their way home.
- This process is termed the cognitive mapping process.
The research
-
The work undertaken uses a mobile robot equipped with sonar sensors.
-
Initially, the robot is instructed to compute a cognitive map of its environment. Since a robot is not a cognitive agent, it cannot, by definition, compute a cognitive map.
-
We approximate such a map by creating a network of local spaces, each being a rough estimate of local space, with known exit points.
The results
-
From the experiments, the robot was able to compute a rough representation of the places visited.
-
Our robot uses distance and orientation information to find its way home.
-
The process developed provides interesting insights into the nature of cognitive mapping and encourages us to use a mobile robot to do cognitive mapping in the future, as opposed to its popular use in robot mapping.

- The robot used in the cognitive mapping project has
ultrasonic transducers for measuring distance.
Different animals have different sensing capabilities. They live in different environments and face unique challenges. Consequently, they evolve to have different navigational strategies.
Two crucial items of information are inherent in all animals and are fundamental to navigation: distance and orientation.
Higher level animals may encode and may even prefer richer information to enhance the animal’s cognitive map. Nonetheless, distance and orientation will always be computed as a core process of cognitive mapping.
The desert ant, Cataglyphis fortis, can be up to 100 m from its nest foraging for food. However it is still able to navigate itself back to its nest. More impressively, it is able to determine the shortest route to get home.