Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Harvard University
Harvard University

Videos
Loading the player ...
- Offer Profile
- Our research focuses on
design, fabrication, control, and analysis of biologically-inspired
microrobots and soft robots. Expertise in microfabrication and microsystem
design, combined with insights from arthropods, enable us to create
high-performance aerial and ambulatory microrobots. Such robotic platforms
can be used for search and rescue operations, assisted agriculture,
environmental monitoring, and exploration of hazardous environments.
Product Portfolio
INSPIRED by the biology of a bee and the insect’s hive behavior ...
- we aim to push advances in miniature robotics and the design of compact high-energy power sources; spur innovations in ultra-low-power computing and electronic “smart” sensors; and refine coordination algorithms to manage multiple, independent machines.
Robobees
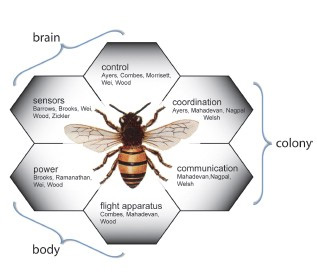
- A CONVERGENCE OF BODY, BRAIN AND COLONY
Practical Applications
Coordinated agile robotic insects can be used for a variety of purposes including:- autonomously pollinating a field of crops;
- search and rescue (e.g., in the aftermath of a natural disaster);
- hazardous environment exploration;
- military surveillance;
- high resolution weather and climate mapping; and
- traffic monitoring.
Vision and Aims
The collaborators envision that the Nature-inspired research could lead to a greater understanding of how to artificially mimic the collective behavior and “intelligence” of a bee colony; foster novel methods for designing and building an electronic surrogate nervous system able to deftly sense and adapt to changing environments; and advance work on the construction of small-scale flying mechanical devices.
More broadly, the scientists anticipate the devices will open up a wide range of discoveries and practical innovations, advancing fields ranging from entomology and developmental biology to amorphous computing and electrical engineering.
Through a relationship with the Museum of Science, Boston, the team will also create an interactive exhibit to teach and inspire future scientists and engineers.
The Team
The investigators, primarily based at Harvard’s School of Engineering and Applied Sciences, will coordinate efforts with faculty from the Department of Organismic and Evolutionary Biology in the Faculty of Arts and Sciences at Harvard and Northeastern University’s Department of Biology.
In addition, Centeye, a microelectronics firm in Washington, D.C., specializing in vision chip and visual sensor technology, will contribute technical knowledge.
A number of the collaborators are core faculty members of the newly created Wyss Institute for Biologically Inspired Engineering. As the work fits particularly well with Wyss’s mission of “creating new materials and devices using Nature’s design principles,” the Institute, along with SEAS, will play a critical role in supporting the research, providing laboratory space and in-kind financial support.
Funding
Harvard is one of three lead institutions receiving the latest round of awards under the NSF’s Expeditions in Computing program.
The program, established last year by the Directorate for Computer and Information Science and Engineering (CISE), provides the CISE research and education community with the opportunity to pursue ambitious, fundamental research agendas that promise to define the future of computing and information and render great benefit to society. Funded at levels up to $2,000,000 per year for five years, Expeditions represent some of the largest single investments currently made by the directorate.
- A CONVERGENCE OF BODY, BRAIN AND COLONY
Overview of Research
- The overarching aspiration of this project is to
combine multiple diverse research topics under the goal of robotic
pollinators. By bringing together experts from biology, computer science,
and mechanical and electrical engineering, our end product will be much more
than the sum of the parts.
While a project of this scale relies on numerous interactions and requires tight collaboration between the investigators, the proposed research neatly falls into three aforementioned categories: body, brain, and colony.
The body involves all aspects of the proposed work that revolve around construction of a flapping-wing robot. We will explore several aspects of free flight mechanics and performance to guide our design of an autonomous robotic bee.
The brain incorporates all of the sensors, control (i.e. algorithms and software), and circuitry (i.e., hardware) to coordinate flight and target identification capabilities of the RoboBees.
The colony encompasses higher-level support required to accomplish objectives of a complex task in a collaborative manner. We seek to leverage the colony as a whole for parallel, energy-efficient, and robust operation.
This project emphasizes collaboration between researchers across a wide range of scientific and engineering disciplines to realize its ambitious goals. It also offers an exciting platform from which to share scientific and technological breakthroughs with the public in a tangible, easily-accessible manner.
- The overarching aspiration of this project is to
combine multiple diverse research topics under the goal of robotic
pollinators. By bringing together experts from biology, computer science,
and mechanical and electrical engineering, our end product will be much more
than the sum of the parts.
Body
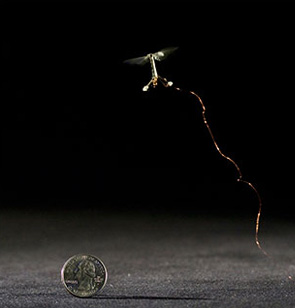
- By leveraging existing breakthroughs from Professor
Wood’s Microrobotics Lab, which conducted the first successful flight of a
life-sized robotic fly in 2007, the team will explore ways to emulate such
aerobatic feats in their proposed devices. In addition, achieving autonomous
flight will require compact high-energy power sources and associated
electronics, integrated seamlessly into the ‘body’ of the machine.
The robotic platform for the colony of artificial bees will be designed using principles derived from insect biomechanics and the fluid dynamics of flapping wings. Proper design of all mechanical and aeromechanical components of the robotic bee are crucial, since propulsive efficiency will determine flight time, and payload limitations will determine the size and mass available for sensing, communication, and other on-board electronics.
Similarly, actuator power requirements necessitate the development of efficient drive electronics, and require portable power sources with high energy-to-weight ratios. Therefore, a rigorous study of the coupled mechanics and aerodynamics of an insect-scale vehicle is essential to the success of this project.
Realization of the body will require extensive research in (1) aerodynamics and control of flapping-wing flight, (2) design and fabrication of the flight apparatus, and (3) portable power sources and drive electronics.
Title: Little RoBeep: Power Sources for Miniature Autonomous Systems
Team: Shriram Ramanathan (faculty), Kian Kerman, Suhare Adam (Grad Students), Siya Xuza (Undergrad student), Quentin van Overmeere and Yuto Takagi (Visiting Scholars)
Abstract:
Miniature thin film solid oxide fuel cells that can be embedded in silicon and kapton platforms have been developed. A substantial effort on materials research and design is involved in this study, that includes the following aspects: 1) oxide electrolyte and electrode materials synthesis in thin film form and suspended membrane form for high performance fuel cell devices, 2) fundamental understanding of ionic and electronic transport in confined structures under extreme chemical potential gradient, 3) detailed analysis of fuel cell performance and limiting factors and 4) fabrication of integrated fuel cells into robotic skins which requires a deep understanding of microstructural effects in thermo-mechanical stability. Key results to date include the first demonstration of scalable thin film solid oxide fuel cells, demonstration of energy storage in fuel cells by design of multi-functional oxide anodes, high performance operation in a variety of fuels including hydrogen, methane and natural gas. The project has also allowed education and research training of a diverse group of undergraduate and graduate students. Strong collaborations exist with other PIs in the project, including Professors Mahadevan and Wood.
Title: Flexible insect wings and flight stability in turbulent airflow
Team: Body
We are investigating several aspects of insect structure and flight control that play key roles in the exceptional flight performance of living insects, with direct relevance to the design of efficient, stable Robobees. Our current projects focus on two areas that remain poorly understood in the biological and engineering literature: the effects of wing flexibility on aerodynamic force production and the influence of turbulent, unsteady airflow on flapping flight stability. We have recently provided the first definitive, experimental evidence that insect wing flexibility improves aerodynamic force production. By experimentally stiffening a flexible vein-joint in bumblebee wings, we showed that passive bending, particularly as the wings stop and reverse direction at the end of each half-stroke, significantly improves aerodynamic force production. We have also shown that several different wing design strategies (including flexible zones that yield under excessive force) can reduce the damage that accumulates in insect wings due to collisions with obstacles. Finally, we are exploring the effects of complex, environmental airflow on insect flight stability through wind tunnel tests of stability and control in unsteady, structured wakes, and outdoor tracking experiments that explore how insects alter their movement patterns in response to windy, turbulent conditions. 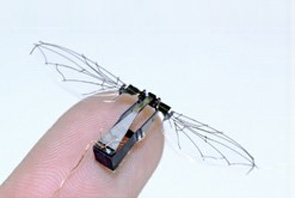
Body of a robotic device

Chip-scale solid oxide fuel cell arrays

Glittered bee
Brain

- One of the most complicated areas of exploration the
scientists will undertake will be the creation of a suite of artificial
“smart” sensors, akin to a bee’s eyes and antennae. Professor Wei explains
that the ultimate aim is to design dynamic hardware and software that serves
as the device’s ‘brain,’ controlling and monitoring flight, sensing objects
such as fellow devices and other objects, and coordinating simple
decision-making.
The second group of research topics involves the development of the ‘brain’ to coordinate all activities of the body and carry out higher-order mission objectives of the colony, described later.
This will include sensors for proprioception and exteroception, an electronic nervous system (ENS), and control algorithms. Just as the focuses of the body were on lightweight and energetically efficient propulsion components, the focuses of the brain will include computationally-efficient control, compact and efficient sensors, and energy-efficient electronic hardware.
The figure illustrates a functional description of the insect nervous system (for Diptera) as well as a hybrid architecture block diagram of the physical manifestation of functions that correspond to the inner workings of the nervous system.
While we are not proposing to build a one-to-one replica, we again use insect biology to guide our design of an artificial brain.
Colony
- Honeybee colonies exhibit incredibly efficient and
adaptive behaviors as a group, even though an individual bee is tiny
compared to the world it lives in. Honeybee colonies regularly find and
exploit resources within 2-6 km of their hive, adapt the number of bees
exploring and exploiting multiple resources (pollen, nectar, water) based on
the environment and needs of the colony, and can even recover when dramatic
changes are made to their world. While much remains to be understood,
biologists believe that many of these sophisticated group behaviors arise
from fairly simple interactions between honeybees in the hive, as they share
information and adapt their own choices. There seems to be no leader, no
centralized authority, to coordinate the hive.
Achieving the sophistication of social insect colonies poses a number of challenges. It will involve the development of sophisticated coordination algorithms, that match the fairly simple and limited sensing and communication we expect in individual robobees. Just as with honeybees, the ability to leverage the colony as a whole will be critical -- for parallelism (exploration of large areas), energy efficiency (through information sharing and division of labor), and robustness (since individuals may fail or make errors). Especially since each individual robobee has strong limitations on the weight and power (and thus sensing/communication) it can carry.
At the same time, to manage swarms of robots (with thousands or more individuals) one cannot be managing single robobees. We will need programming languages and run-time tools that support a "global-to-local" approach. A key challenge will be the design and scalable implementation of macro languages, where goals can be expressed in terms of high-level objectives for the colony and where the underlying system translates objectives into individual bee decisions and re-optimizes as the world changes.
The RoboBee colony challenges are shared with many other fields in computer science -- for example multi-robot and robot swarm systems, distributed sensor networks, programming languages research, and even synthetic biology. Our colony team leverages expertise and knowledge in multiple disciplines, and we expect our methodologies to apply to many large-scale systems.
Some of our current efforts include
(1) Karma Programming System and Stochastic control policies
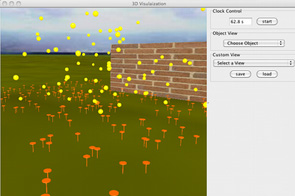
(2) Simbeeotic Simulation Environment
(3) Heli-testbed Environment
(4) Models of Honeybee Information-sharing
- Honeybee colonies exhibit incredibly efficient and
adaptive behaviors as a group, even though an individual bee is tiny
compared to the world it lives in. Honeybee colonies regularly find and
exploit resources within 2-6 km of their hive, adapt the number of bees
exploring and exploiting multiple resources (pollen, nectar, water) based on
the environment and needs of the colony, and can even recover when dramatic
changes are made to their world. While much remains to be understood,
biologists believe that many of these sophisticated group behaviors arise
from fairly simple interactions between honeybees in the hive, as they share
information and adapt their own choices. There seems to be no leader, no
centralized authority, to coordinate the hive.