
- Offer Profile
- The Chinese University of Hong Kong is a comprehensive research-led university in Hong Kong delivering high-quality education on both undergraduate and postgraduate levels and serving the community with its cutting-edge research capability.
Robot Dexterity
Robot drawing
- Motivation
Robot drawing attracts great interest for the fact that it constitutes a new medium for artistic expression, made possible by the rapid advances in computing and robotics technology. The first well-known case of robot drawing is the robot painter Aaron pioneered by Harold Cohen. Numerous other systems have also been reported. Robot drawing has now become an integrated study in the fields of robotics, computer vision, artificial intelligence and graphics. There is an annual show of artistic robot (ARTBOT), featuring various kinds of drawing systems in different sizes and shapes based on different operating principles. Almost all of these systems, however, are designed for Western style paintings and for arbitrary rendition of artistic creations. Some works on computer manifestation of Chinese calligraphies and drawings have also been reported in recent years. They are, however, mainly confined to simulation studies and do not involve actual production of artworks.
The team at the Intelligent Control Systems Laboratory of the Mechanical and Automation Engineering at the Chinese University of Hong Kong has recently developed a robot drawing platform aimed at studying Chinese painting and calligraphy. The platform is called REAP, standing for “Robotic Expression of Acquired Penmanship.” Besides being a platform for robotics research, its focus is on the actual replication of, albeit simple, Chinese artworks, and the acquisition of expert calligraphic and painting skills. Our ultimate goal would be for REAP to become an “artistic” platform with its own style in Chinese artistry.Hardware Setup
REAP is a robotic platform with a 5-DOF manipulator (Figure 1) consisting of a x-y-z axis translational mechanism holding a robot gripper with an additional z-axis rotation DOF. The 5th DOF is provided by the tilting of the brush pen. Together, the 5 DOFs serve to provide the dexterity for emulating the fine hand and wrist motions of executing Chinese brush strokes. The DOFs are all independently commanded, doing away with the kinematics problems associated with many robotic systems. The input commands are executed through a PID type controller.
Figure 2 shows an additional mechanism on the manipulator containing a servomotor and a brush holder to lock and rotate the brush pen along its axis. The mechanism cannot improve the working DOFs of the brush pen, but the induced axial brush rotary motion would enable the removal of excessive ink from the brush and the straightening of its hair when needed, both essential in performing Chinese brush artistry.Demonstrated Capabilities
So far, REAP is capable of automated line stroke drawing upon the input of a proper image. The system is also capable of conducting vision-based iterative drawing. This means that the current executed drawing is compared with the original image to “intelligently” deduce the “imperfections” herein. Information from the comparison will thus be applied in the next execution for improved quality. Figure 3 shows a line drawing executed by REAP and its comparison with the original. For full stroke calligraphy, the system is able to decompose given characters into individual strokes, and then generate the needed commands to replicate the given characters. Figure 4, 5 and 6 present three works executed by REAP. The originals are also shown for comparison.
For now, the developed algorithms do not distinguish between execution of calligraphy and painting. This is why in the execution of the Chinese calligraphies, there are mistakes in the order of executing the stroke elements, something considered important in Chinese writing. We will try to improve in this regard in future work. We are also in the process of building a setup so we can invite Chinese calligraphers and painters to come into our laboratory for real time recordings of their brush motions during the execution of their artworks. The database collected will serve in future studies of analyzing and rendering the various styles of the artists. 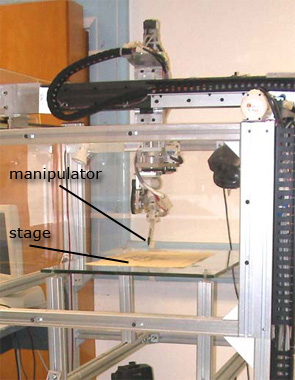
Figure 1. The Platform REAP
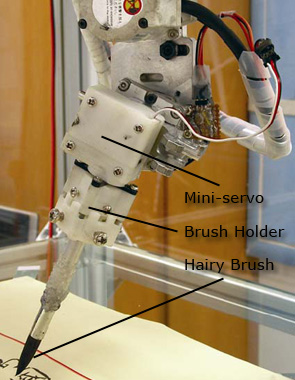
Figure 2. The manipulator and the axial brush rotary mechanism
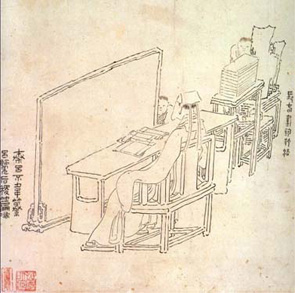
Figure 3. Painiting by Su Renshan: original
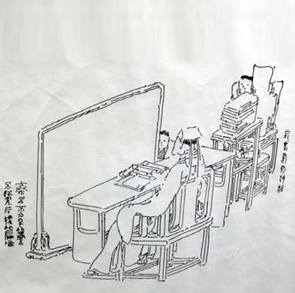
and replication by REAP
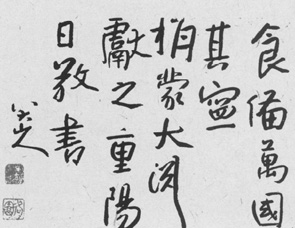
Figure 4. Calligraphy by Bada Shanren: original
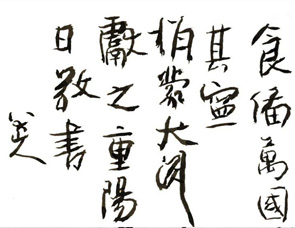
and replication by REAP
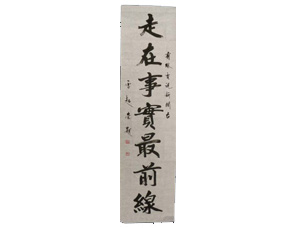
Figure 5. Calligraphy by Chiu Wing Lui: original
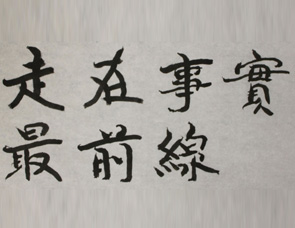
and replication by REAP