Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> University of Brescia
University of Brescia

- Offer Profile
- Brescia University Advanced
Robotics Laboratory (ARL) was established in 1993, with the main goal of
providing researchers and students with an efficient and flexible tool for
experimental verification of ongoing research in the field of robotics.
ARL is directed by Professor Riccardo Cassinis, who has been conducting research in the area of robotics for the last 25 years, and has founded similar laboratories at other universities.
ARL is available to any researchers and students who need an experimental support to their theories.
Product Portfolio
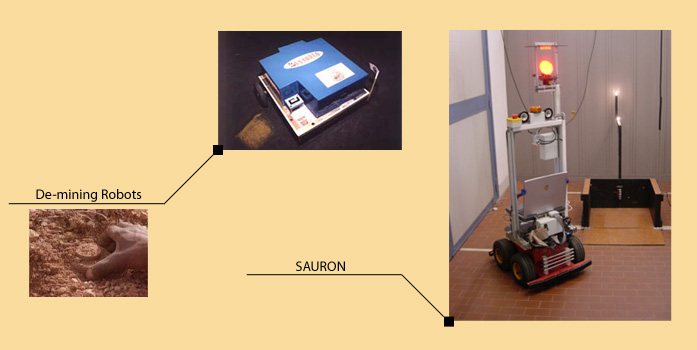
SAURON
- Costliness is one of the key problems with today’s
robots.
Cost-effectiveness is central to the SAURON (Surveillance Autonomous Robot
Over Network) project.
Developing affordable robots, using off-the-shelf technologies and taking advantage of infrastructures that already exist in the robot’s operating environment. SAURON project aims at building inexpensive robots that have a moderate interaction with the environment, such as surveillance an environmental monitoring robots. The SAURON project focuses on development of an autonomous vehicle for indoor and outdoor use, capable of carrying video cameras and other sensors to provide a real time link with surveillance posts or data collection facilities.
The key features of the project include:
• Extensive use of existing components, acquired as much as possible from the consumer market, thus keeping the robot’s cost as low as possible
• Intensive use of resources already present in the environment (sensors, data communication net-works, public phone services, computing resources, etc.)
• Development of more economical technology for self-localization and mapping, using less expensive components, thus further reducing total cost of to-day’s robots 
MORGUL
MORGUL (Mobile Observation Robot for Guarding the University Laboratories) robot, in its current version, is an ActivMedia Pioneer 3AT robot equipped with:
• Onboard web-cam
• Active marker
• Laptop
• APNS (on laptop)
• ARIA robot programming libraries (on laptop)
• Wireless networking devices
• Sonar belt
• Front and rear bumpers
MORGUL also has a docking station, that can be reached using a simple optical homing system that uses the onboard webcam. The docking station contains a battery charging system, and allows fully autonomous operation of the robot over extended periods of time.

AMIRoLoS
Localization is one of the fundamental problems in mobile robot navigation. AMIRoLoS (Active Marker Internet-based Robot Localization System) implements a new methodology aimed at localizing a mobile robot in indoor and outdoor environments using active markers and commercial off-the-shelf webcams. The marker detection system, which is based on the difference of working frequencies of the shutter of a webcam and of a signal from the marker, can be detected at a distance of up to 100m from the camera in full sunlight.

APNS
APNS (Automatic Predictive Network Selection) is a software package designed to allow a mobile robot to autonomously manage the access to heterogeneous wireless TCP/IP networks. With this software, the robot is able to look for an available communication channel and to establish a new connection to it. Moreover, if the robot detects more than one network, it can choose the best one according to predefined criteria. The main goal of this project is to make the robot able to use, always and everywhere, the best available way of communicating, without the need of explicitly connecting end disconnecting from available networks.
This task can be completed without any awareness of the context in which the robot is: this means that the robot can immediately start working in a new location with no need for reconfiguration. However, the system can take advantage of previously acquired knowledge to choose in advance the most appropriate connection. In a future version, knowledge of the task the robot is performing will also be used to optimize communication.
ARCSUS (Advanced Robot Control System Using SVG)
In order to visualize and control the system, we are developing an SVG graphic interface that will allow controlling the system from local or remote computers using standard browsers. The interface can be visualized over the Internet by any browser and any OS with an SVG plug-in using W3C standards (W3C validation in XHTML 1.0 and CSS).
De-mining Robot Project
- The highly expensive (in economical terms and, much
more important, for its human lives cost) problem of cleaning mines from
former war areas is one of the most challenging for robotics engineers.
As mines were obviously built to be undetectable, locating them is a highly dangerous and difficult task. Many worldwide projects were started, some concentrating on a single kind of sensor, some using several different sensors and integrating the information they provide. Our project, carried on in cooperation with researchers from the Chemistry and Physics Department of our University, focuses on detecting the odors of chemical substances associated with mines. This requires highly sensitive gas detectors, and, maybe even more important, an intelligent search strategy that will take into account environmental conditions, wind speed and direction, etc. We are fairly convinced that no single sensor will solve the problem, but multiple sensors (or multiple single-sensor robots operating in a coordinated way) can attain a very high level of reliability.
An international research consortium is being organized to apply for funding for this research. 
Sensors & Robots for demining
Sensors:
During the last few years, dozens of other methods have been developed for detecting landmines. Each of them, however, has advantages and drawbacks, and no method exists that can be regarded to as universal. We have compared all existing methods (at least, all the methods we know) in a single table.
Robots:
In order to understand what is now available on the market and in research laboratories as far as robots for demining are concerned, we have carried on a survey about existing machines. The results, along with pictures and some movies, are shown here.

Mine Sniffer Project
- As mines were obviously built to be undetectable, locating them is a highly dangerous and difficult task. Many world-wide projects were started, some concentrating on a single kind of sensor, some using several different sensors and integrating the information they provide. This project, carried on in cooperation with researchers from the Chemistry and Physics Department of our University, focuses on detecting the odors of chemical substances associated with mines. This requires highly sensitive gas detectors, and, maybe even more important, an intelligent search strategy that will take into account environmental conditions, wind speed and direction, etc. To demonstrate the feasibility of the project, two prototypes have been built, that can locate odor sources using and appropriate strategy.