
- Offer Profile
- The Robotics and Spatial Systems Laboratory (RASSL) is dedicated to the development of robotic mechanical systems that generate spatial (i.e. 3-dimensional) motion and force transmission. The Lab seeks to advance the design methodologies for these challenging systems as well as techniques for their utilization in industrial and consumer applications.
MOBILE ROBOT SYSTEMS
PantherBot
- A general purpose mobile robot platform for
autonomous navigation and teleoperation
The PantherBot is built on a MobileRobotsTM PowerBot mobile robot platform equipped with a laser navigation system and a Schunk 6-DOF robot arm. The PantherBot is equipped with: a 6 degree of freedom robot arm manufactured by Schunk Inc. with a reach of 1 (m) and a payload capacity of 3 (kg), a SICK laser rangefinder, 21 sonar collision sensors, two video cameras, 802.11b WiFi, and two on-board pc's runing Linux. The PantherBot base has the ability to autonomously map terrain and perform SLAM (Simultaneous Localization And Mapping). The system can also stream live footage from the PantherBot’s two cameras mounted on-board; one on the PantherBot’s base, the other adjacent to the parallel gripper on the robotic arm to monitor the arm’s movements remotely over 802.11b WiFi.
PantherBot Tools (Tai, Rae, Nunn, Larochelle)
The goal of the PantherBot Tools project was to design tools and related hardware and software to provide our mobile robot PantherBot with the capability to open doors and press wall panel buttons so that it can roam autonomously inside the F. W. Olin Engineering Complex. The project resulted in the design of two novel tools: the Prod and the Enterprise. The Prod is used to press wall panel buttons while the Enterprise is used to rotate door handles and open doors. 
The PantherBot with the Prod tool deployed.
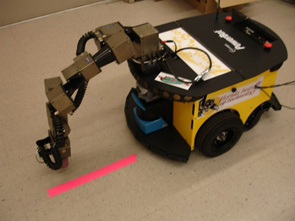
The PantherBot using its arm to reach the floor.

The PantherBot Tools Team.
Intelligent Ground Vehicle
- An autonomous mobile robot (Bishnoi, Larochelle)
This project began as a capstone (i.e. senior) design project. The goal was to create an autonomously navigated vehicle to be entered into the Intelligent Ground Vehicle Competition (IGVC). The IGVC is an engineering challenge in which the main goal is to design a robot that has enough artificial intelligence to autonomously navigate through a course full of obstacles such as barrels, pot holes, and sand traps. The robot is equipped with a SICK LMS 291 laser range finder (lidar), a digital compass, a Hemisphere Eclipse digital global positioning systems (gps), stereo cameras, an Intel Core 2 Quad 2.83 GHz pc with a solid-state drive, an ARM 7 Cortex M3 sub processor, two 25 (Amp) drive servos with encoder feedback, and a 24V (dc) supply for up to 2 hours of autonomous operation.Software Architecture
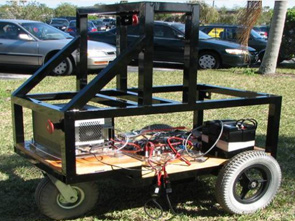
The Prototype

The "insides" of the IGV

The IGV Team
ROBOT WORKCELL SYSTEMS

RoboGami - Motoman art!
- In Summer 2007 a MAE-4090 Robotics & Automated Manufacturing class project was challenged with creating a robotic system for making origami- the ancient Japanese art of paper folding.

MotoCheck
- Shall we play a game?
In Summer 2006 a MAE-4090 Robotics & Automated Manufacturing class project was challenged with creating a robotic workcell using our Motoman SV3 to play checkers against a human opponent. To date- only 2 people have defeated our Motoman!

RuBot
- Solving the Cube!
In Summer 2004 a MAE-4090 Robotics & Automated Manufacturing class project was challenged with creating a robotic workcell using our Motoman SV3 to solve the famous Rubik's cube.

Parallel Jaw Gripper
- Parallel Jaw End-Effector with Force Control (Caballero,
Larochelle)
A force controlled parallel jaw gripper was designed for use in RASSL's robotic systems. This end-effector is powered by a pneumatic cylinder which is controlled by a microcontroller through an electro-pneumatic regulator. The result is a parallel jaw gripper that is able to apply a gripping force of up to 15(lbs.) that is utilized to support both the research and educational activities of the Lab.
ROBOT WORKCELL SYSTEMS
Self-Collision Detection
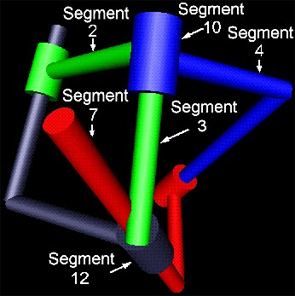
Collsion Detection in Spatial Robotic Mechanical Systems (Ketchel, Larochelle)- The methodology developed detects collisions of
cylindrically shaped rigid bodies moving in three dimensions. The algorithm
utilizes line geometry and dual number algebra. The rigid bodies are modeled
with infinite cylinders and the condition for a collision is evaluated. If
the condition is not satisfied, then the two bodies do not collide. If the
condition is satisfied, the algorithm continues. The bodies are then modeled
with finite cylinders. Another algorithm is followed and results in an
efficient way of detecting collisions in three dimensional motion.
Lines are used to define the locations of finite cylinders in three-dimensions and line geometry is then used to determine if cylinders collide or interfere with each other.
Our collision detection algorith has been utilized to detect self-collisions in a spatial 4C robotic mechanism as well as in motion planning for an industrial robot installing a dashboard into a car frame on an automobile assembly line.
TORUS
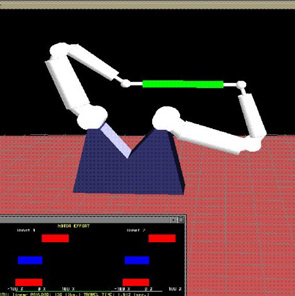
Time Optimal Robot Systems (Larochelle, McCarthy, Bobrow)- TORUS(Time-Optimal Robot systemS) is a numerical optimal
control package coupled with a computer graphics interface. At the heart of
TORUS is a time-optimal control strategy which interacts with a nonlinear
optimization package to determine the dynamic performance limits of robotic
systems. The result is that the designer is able to evaluate with respect to
practical dynamic criteria the design of a robotic system. Some of the
dynamic performance criteria that are easily determined for a prescribed
task with TORUS include: determining the maximum dynamic payload,
determining the minimum time required to complete the task, determining the
performance benefits of having two or more robots cooperate to accomplish
the task, and evaluating the dynamic effects of different grasps on the
workpiece.
Shown above are two cooperating Odetics robot arms moving a workpiece(green). The time to accomplish the task, the maximum payload, and the current motor torques as a percentage of their maximum output are shown in the lower left display window.

FIRST Dynamics
Dynamic Analysis and Simulation of the 1997 Space Coast Team F.I.R.S.T. Robot (Pérez-Núñez, Larochelle)- This MS thesis research presented a computer analysis and simulation of a 3-R planar robot. The robot was designed by the Space Coast Team for the 1997 F.I.R.S.T. robotic competition and it was analyzed using Adams 8.2, a powerful commercial program for simulating and analyzing mechanical systems. Three different cases were studied in order to compare the results from the computer analysis on a relatively simple model to actual experimental data. The purpose of this work was to determine the degree of sophistication required in computer models in order to obtain results which are near actual hardware performance.
MECHANISM DESIGN

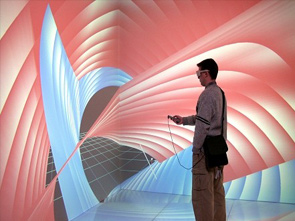
VR Spatial
Designing Spatial 4C Mechanisms Using Virtual Reality (Larochelle, Vance, Dorozhkin, Tse, Agius)- This is a multi-institutional collaborative research project funded by the National Science Foundation's DMII Engineering Design Program. Here RASSL has partnered with Prof. Judy Vance of Iowa State University(ISU). Prof. Vance and her student Denis Dorozhkin are affiliated with ISU's Virtual Reality Applications Center (VRAC). VRAC is a world leader in developing human interfaces to computer generated virtual environments to amplify the creativity and efficiency of people. This research project explores using virtual reality (VR) as a tool for designing spatial 4C mechanisms for rigid-body guidance. Spatial 4C mechanisms are two degree of freedom closed kinematic chains consisting of four links connected by cylindrical (C) joints. A cylindrical joint provides both translational and rotational movement along its axis. Spatial mechanisms offer a better alternative to electronically controlled multiple-input devices, such as robotic manipulators. Being purely mechanical devices, spatial mechanisms are less expensive, more reliable and more energy efficient. A single spatial mechanism is often capable of completing a motion task that would otherwise require several planar mechanisms to accomplish. Despite the potential benefits associated with operation of spatial mechanisms, development of such mechanical systems has been hindered by the lack of the appropriate mechanism design software applications.
SPASUR
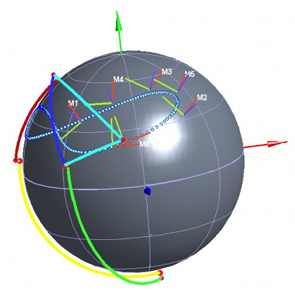
SPAtial SURfaces of the 4C Mechanism (Agius, Larochelle)- SPASUR is a program written to generate parametric
representations of the coupler surfaces of spatial 4C mechanisms and to
provide interactive visualization of these surfaces. Spatial 4C mechanisms
are two degree of freedom closed-chains. Hence, the available motion of any
given coupler point is a three-dimensional surface. We have shown the the
coupler surfaces of spatial 4C mechanisms are straight line ruled surfaces
with directrices of 16th degree.
The coupler surface is the set of all points reachable by a point attached to the coupler of the mechanism. Here, the MATLAB implementation of SPASUR shows the coupler surfaces of a crank-rocker spatial 4C mechanism. Finally, our implementation of SPASUR into our VRSpatial immersive virtual reality design environment is shown. Visualizations of the coupler surfaces have proven very useful in designing spatial mechanisms.
Mirror Positioning Device & Spherical Orienting Device
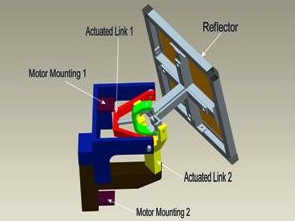
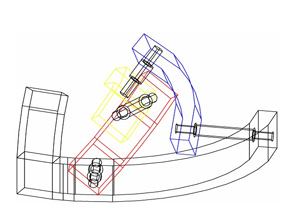
The Mirror Positioning System (MPD) (Brown, Tonapi, Larochelle, Sharaf-Eldeen)- The goal of this project is to design a device to
increase solar radiation onto photo-voltaic (pv) arrays to produce clean
energy. Solar tracking is used to reflect solar radiation using a mirror
positioning system onto a stationary PV array. The mirror positioning
systems consists of a novel spherical five-bar mechanism driven by two servo
motors- both fixed to and supported by the base.
The resulting design is a novel two degree of freedom spherical five-bar mechanism capable of positioning the mirror as desired. The mechanism utilizes 180 degree link lengths to increase the rigidity. The mechanism design is inspired by the agile-eye and related works by Prof. Clement Gosselin of Laval University. The new design has several advantages: Novel manipulation of the reflector requires less power than traditional PV array tracking systems; Open-Loop solar tracking is based on well known orbital mechanics so there is no need for sensors to determine the position of the sun; Two degree of freedom spherical motion yields a large singularity free mirror orienting workspace- an altitude range of 40 to 115 degrees and an azimuth range of 24 to 156 degrees.
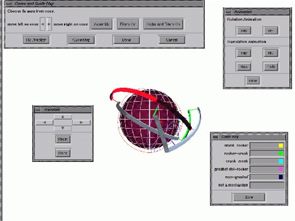
OSIRIS
Designing Spatial & Spherical Mechanisms (Tse, Larochelle)- OSIRIS is a new generation spherical and spatial mechanism CAD program. It is portable to many computer platforms. OSIRIS is being developed with computer graphics and this will allow the user to visualize the entire mechanism and its motion. OSIRIS uses OpenGL for its graphics library. OSIRIS has full featured GUI and is using the motif libray to develop its GUI. The spaceball input device with 6 input axes(3 position and 3 orientation) is integrated into OSIRIS. These 6 input axes allow the user to graphically place all desire locations. The user can also place locations with the mouse or key in the desired location's details. The full featured GUI and the spaceball input device make OSIRIS relatively easy to use. OSIRIS can synthesize spherical and spatial mechanisms for 2, 3, 4 locations(orientations) and has filters to eliminate most unusable mechanism designs. There is also a module to help design sperical mechanisms for general spatial tasks. A guide map will be generated for four location(orientation) mechanism synthesis. The guide map will display all possible designs and their mechanism type at one time. This allows the user to pick and choose which mechanism design best fits the needs of the desired task. OSIRIS will also generate a guide map for two location(orientation) mechanism synthesis by using Bézier motion interpolation which will add another two locations(orientations).
SPADES
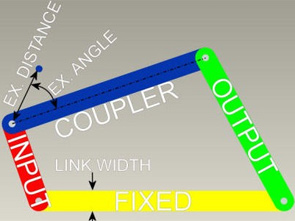
Designing Spatial 4C Mechanisms (Larochelle)- SPADES is an interactive graphics based software package
for SPAtial mechanism DESign. The program provides a platform for the
synthesis of a spatial 4C mechanism that guides a body through either three
or four prescribed positions in space. A spatial 4C mechanism consists of
four links connected by cylindrical(C) joints. The two degree of freedom C
joints allow both relative translation and rotation about a line which
differs from the common planar revolute(R) or hinge joint which allows only
relative rotation about a line. The goal in creating SPADES was to assemble
the current spatial 4C synthesis and analysis theory into a software package
that is useful for spatial mechanism design and research. SPADES runs on
Silicon Graphics platforms running IRIX.
The spades design environment is made up of four unique windows. The window in the upper-left displays the 4C mechanism. The linkage may be animated in this window. The window in lower-left diplays the position synthesis. The four locations may be changed in this window. The window in the upper-right shows all location and link information. The link lengths and locations can be changed in this window simply by keying the appropriate information. The window in the lower-right shows the fixed and moving congruences. The guide map displays all possible solutions for the four locations given.
Spatial 4C Prototype
Spatial 4C Mechanism Prototype (Ustun, Agius, Larochelle)- A prototype spatial 4C mechanism was designed and prototyped. A spatial 4C mechanism is a two degree of freedom closed chain consisting of 4 links connected serially via cylindrical (C) joints where a cylindrical (C) joint is a two degree of freedom joint allowing rotation and/or translation about a line in space. Spatial 4C mechanisms are the three-dimensional analog of the common planar four-bar mechanism. But a significant difference exists between the spatial 4C and planar four-bar mechanisms. Whereas planar four-bar mechanisms are restricted to moving in a two-dimensional plane, spatial 4C mechanisms are capable of generating motions and/or force transmissions in general three-dimensional space. Yet, these mechanisms only require the actuation and control of two degrees of freedom whereas typical industrial robots have 6 or more joints that are actively controlled to generate three-dimensional motions. RASSL is working to develop novel tools to facilitate the design and implementation of these exciting robotic mechanisms.
SFB Designer
Web-based Computer-Aided Design & Manufacturing of Spherical Mechanisms (Schuler, Ketchel, Larochelle)- SFB Designer is an enhanced web-based version of our SphinxCAM software. SphinxCAM is the world's first computer-aided manufacturing(CAM) software for spherical four-bar mechanisms. These devices have proven to be useful for orienting parts however their manufacture can be challenging. To date this challenge has limited their use in industrial and consumer applications. SFB Designer was created to address this challenge and facilitate the design and use of spherical mechanisms. SFB Designer provides designers a free, web-based, tool to layout the parts and view the assembled mechanism. SFB Designer lets the user specify the dimensions of a spherical mechanism and then Pro|E part and assembly drawings are automatically generated. These drawings can be downloaded as Pro|E part and assembly files or in STEP, dxf, iges, and other formats for use with other CAD/CAM software packages. These files can be used to: visualize the three-dimensional assembly of the mechanism(ASM, JPG or TIF), perform static and dynamic analyses(ASM), make a rapid-prototype (STL or STEP), or finally to manufacture the mechanism using a CNC machine tool (IGES or DXF). Moreover, tiff and jpg images of the assembled mechanism can be generated as well (see below). SFB Designer facilitates the design, visualization, prototyping and manufacture of spherical four-bar mechanisms. SFB Designer lays out the mechanism's links using circular arcs with feet at either end. The feet are designed to facilitate the accurate placement and orientation of the axes and the use of bearings. The circular arcs are designed to allow the links to be spaced closely together. The result is a compact mechanism that conserves material and has been layed out to facilitate precise arc lengths and accurate axes placement.
PFB Designer
Web-based Computer-Aided Design & Manufacturing of Planar Mechanisms (Schuler, Larochelle)- PFB Designer is inspired by SFB Designer- our web-based analysis and manufacturing tool for spherical four-bar mechanisms. PFB Designer was created to address the challenges of detailed design, part layout, and dynamic analyses of planar four-bar mechanisms. PFB Designer provides designers a free, web-based, tool to layout the parts and view the assembled mechanism. PFB Designer lets the user specify the dimensions of a planar four-bar mechanism and then Pro|E part and assembly drawings are automatically generated. These drawings can be downloaded as Pro|E part and assembly files or in STEP, dxf, iges, and other formats for use with other CAD/CAM software packages. These files can be used to: visualize the three-dimensional assembly of the mechanism(ASM, JPG or TIF), perform static and dynamic anlyses(ASM), make a rapid-prototype (STL or STEP), or finally to manufacture the mechanism using a CNC machine tool (ASM, STL or STEP). Moreover, tiff and jpg images of the assembled mechanism can be generated as well (see below). PFB Designer facilitates the design, visualization, prototyping and manufacture of planar four-bar mechanisms. PFB Designer lays out the mechanism's links using feet at either end. The feet are designed to facilitate the accurate placement and orientation of the axes and the use of bearings. The result is a compact mechanism that conserves material and has been layed out to facilitate precise link lengths and accurate axes placement.
SPHINX
Designing Spherical Four-Bar (4R) Mechanisms (Larochelle, McCarthy, Murray, Bodduluri, Dooley)- SPHINX is an interactive graphics based software package
for designing spherical mechanisms. The program provides a platform for the
synthesis of a spherical four-bar mechanism that guides a body through
either three or four prescribed orientations in space. A spherical four-bar
mechanism consists of four links connected by revolute(R) or hinge joints.
The single degree of freedom R joints in a spherical mechanism allow
relative rotation about arbitrary lines in space. This differentiates
spherical 4R mechanisms from common planar four-bar mechanisms which consit
of four links connected by revolute(R) joints whose lines are all parallel.
The goal in creating SPHINX was to assemble the current spherical 4R
synthesis and analysis theory into a software package that is useful for
spherical mechanism design and research. SPHINX runs on Silicon Graphics
platforms running the IRIX operating system.
The Sphinx design environment is made up of four unique windows. The window in the upper-left displays the spherical links. The links may be animated in this window. The window in lower-left diplays the position synthesis. The four orientations can be changed in this window. The window in the upper-right shows all position and link information. The link radii and orientations can be changed in this window simply by keying the appropriate information. The window in the lower-right shows the guide map. The guide map displays all possible solutions for the four orientations given. Unsable solutions may eliminated by using the sigularity check option.
SPHINX
Designing Spherical Four-Bar (4R) Mechanisms (Larochelle, McCarthy, Murray, Bodduluri, Dooley)- SphinxCAM is the world's first computer-aided manufacturing(CAM) software for spherical four-bar mechanisms. SphinxCAM was created to bridge the gap between designing and manufacturing of spherical four-bar mechanisms. There are currently tools available, Sphinx, SphinxPC and Isis, which aid the design and visualization of spherical mechanisms. After identifying a suitable mechanism, the problem was being able to prototype it. The mechanism's links must have precise arc lengths and accurate axes placement. SphinxCAM is capable of taking the data from Sphinx, SphinxPC, or Isis and combining it with other machine data to accurately draw the links for the mechanism. SphinxCAM outputs the drawing of the mechanism and the sizes of the spacers needed to assemble the mechanism. These drawings may then be imported into standard CAM packages to generate NC code and manufacture the mechanism links with a high degree of accuracy. SphinxCAM is written in AutoLISP computer language that runs in the AutoCAD environment.

The Infinity Fan
A Novel Spherical Four-Bar Mechanism (Dees, Ketchel, Larochelle)- The Infinity Fan (U.S. Patent #6213715) was designed and fabricated by Stacy L. Dees and John S. Ketchel under the supervision of Dr. Pierre Larochelle with the support of a Research Experiences for Undergraduates supplement to grant #DMI9612062 from the National Science Foundation. The purpose of the supplemental research grant was to design and prototype a working spherical four-bar mechanism, which is The Infinity Fan. The Infinity Fan is designed to be either a desk top or standing fan with motion in both the vertical and horizontal directions. The motion that the spherical mechanism produces makes the fan face move in an "infinity" or sideways figure-eight pattern upon a spherical surface
MOTION PLANNING
Approximately Bi-Invariant Metrics
Distance Metrics on SE(3) and SE(2) (Venkataramanujam, Larochelle)- There are various useful metrics for finding the distance between two points in Euclidean space. However, metrics for finding the distance between two rigid body locations in Euclidean space depend on both the coordinate frame and units used. A metric independent of these choices is desirable. We have developed a metric for a finite set of rigid body displacements which uses a mapping of the special Euclidean group SE(N-1). This technique is based on embedding SE(N- 1) into SO(N) via the polar decomposition of the homogeneous transform representation of SE(N-1). To yield a useful metric for a finite set of displacements appropriate for design applications, the principal frame and a characteristic length are used. A bi-invariant metric on SO(N) is then used to measure the distance between any two displacements in SE(N-1). A detailed algorithm for the application of this method was presented and illustrated by three examples. This technique has potential applications in mechanism synthesis and robot motion planning.
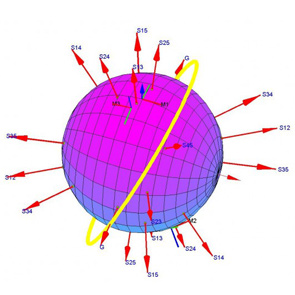
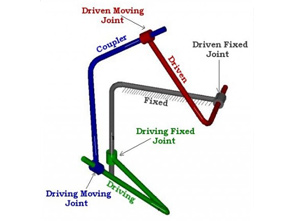
The Hoop Method
Orientation Order Analysis of Spherical Dyads (Tipparthi, Larochelle)- In this work we created a novel methodology for orientation order analysis of spherical RR dyads. The objective of the methodology is to determine if a prescribed fixed axis location for a spherical RR dyad will result in the dyad guiding a moving rigid-body through a set of finitely separated spherical orientations in the desired order (e.g. 1, 2, 3, 4, etc.). The planar propeller methodology of Myszka, Murray, and Schmiedeler for assessing order in planar RR dyads is extended to yield a spherical hoop methodology. The hoop is a great circle on the design sphere that intersects the fixed axis of the spherical RR dyad. The hoop method involves rotating the hoop about the fixed axis and noting the order in which the relative rotation axes are encountered. The result is a useful tool to determine if a given spherical RR dyad will guide a moving body through a set of prescribed orientations in the desired order.
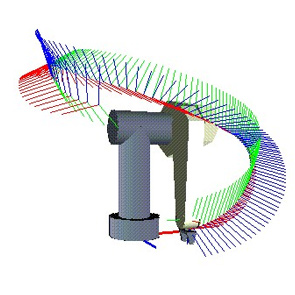
Bézier Motion Interpolation
(Parouty, Larochelle)- This research effort applied Bézier motion interpolation and computer graphics methods to robotic trajectory generation. This software tool enables the user to reconstruct the desired industrial scenario in a computer environment to generate practical trajectories for robots. Our experience with the design of robotic trajectories has demonstrated the need for the trajectory designer to be able to visualize the motion problem in three dimensions and enabling the designer to take a visual approach to solving the problem. Through a comprehensive user interface and efficient computational algorithms our software enables the designer to easily define a precise motion task for any robot and create a smooth and practical trajectory with a click of a button. To illustrate our work on motion interpolation we developed a specialized version of our trajectory planning software for the popular PUMA 560 robot arm. This version of the software allows the user to create trajectories for the PUMA 560 and actually visualize the robot following the interpolated motion.