Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Worcester Polytechnic Institute - RAIL
Worcester Polytechnic Institute - RAIL

Videos
Loading the player ...
- Offer Profile
- The Robot Autonomy and Interactive Learning research group at Worcester Polytechnic Institute (WPI) focuses on the development of interactive robotic and software systems. Our work aims to provide everyday people with the ability to customize the functionality of autonomous devices. Our research spans the fields of robot learning, adjustable autonomy, crowdsourcing, multi-robot teaming and human-robot interaction.
Product Portfolio
Research
- The development of robots that work cooperatively with
people is of critical importance for furthering advancements in
manufacturing, medicine, healthcare, military, and consumer applications.
Critical to this goal is the development of technologies that are adaptable
to changing task and user needs.
The Robot Autonomy and Interactive Learning research group at Worcester Polytechnic Institute (WPI) focuses on the development of interactive robotic and software systems. Our work aims to provide everyday people with the ability to customize the functionality of autonomous devices. Our research spans the fields of robot learning, adjustable autonomy, crowdsourcing, multi-robot teaming and human-robot interaction.

Projects

Robot Learning from Demonstration
- Robot learning from demonstration (LfD) research focuses
on algorithms that enable a robot to learn new task policies from
demonstrations performed by a human teacher. See the Survey of Robot
Learning from Demonstration for more information on this research area. Our
current work includes the first comparative evaluation of leading algorithms
in this area and the development of new multi-strategy learning algorithms:
- Halit Bener Suay and Sonia Chernova. A Comparison of Two Algorithms for Robot Learning from Demonstration. In the IEEE International Conference on Systems, Man, and Cybernetics, 2011.
- Halit Bener Suay and Sonia Chernova. Effect of the Human Guidance and State Space Size on Interactive Reinforcement Learning. In the IEEE International Symposium on Robot and Human Interactive Communication (Ro-Man), 2011

RoboCup Autonomous Robot Soccer
- RoboCup is an international competition that aims to promote AI and robotics research through the development of autonomous soccer playing robots. WPI competes in the Standard Platform League, which requires all teams to use the Aldebaran Nao robots. The robots are not remote controlled in any way; they observe the world through two head-mounted cameras and use this information to recognize objects in the environment and their own location on the field. Robots communicate with each other using the wireless network and use on-board processing to decide which actions to take. Here is an article describing the event and WPI Warriors team.
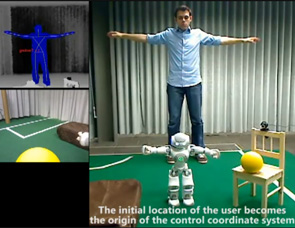
Open Source Kinect Interface for Humanoid Robot Contro
- The ROS Nao-OpenNI package provides gesture-based control
for humanoid robots using the Microsoft Kinect sensor. The video shows the
code being used to control an Aldebaran Nao.
The video on top shows the code being used to control an Aldebaran Nao.
Human-Agent Transfer
- Human-Agent Transfer (HAT) is a policy learning technique
that combines transfer learning, learning from demonstration and
reinforcement learning to achieve rapid learning and high performance in
complex domains. Using this technique we can effectively transfer knowledge
from a human to an agent, even when they have different perceptions of
state.
- Matthew Taylor, Halit Bener Suay and Sonia Chernova. Integrating Reinforcement Learning with Human Demonstrations of Varying Ability. In the International Conference on Autonomous Agents and Multi-Agent Systems (AAMAS), Taipei, Taiwan, 2011.
- Matthew E. Taylor, Halit Bener Suay and Sonia Chernova. Using Human Demonstrations to Improve Reinforcement Learning. In the AAAI 2011 Spring Symposium: Help Me Help You: Bridging the Gaps in Human-Agent Collaboration, Palo Alto, CA, 2011.
Cloud Primer: Leveraging Common Sense Computing for Early Childhood Literacy
- Providing young children with opportunities to develop early literacy skills is important to their success in school, their success in learning to read, and their success in life. This project focuses on the creation of a new interactive reading primer technology on tablet computers that will foster early literacy skills and shared parent-child reading through the use of a targeted discussion-topic suggestion system aimed at the adult participant. The Cloud Primer will crowdsource the interactions and discussions of parent-child dyads across a community of readers. It will then leverage this information in combination with a common sense knowledge base to develop computational models of the interactions. These models will then be used to provide context-sensitive discussion topic suggestions to parents during the shared reading activity with young children.