Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> MOONRABBIT ROBOTICS
MOONRABBIT ROBOTICS


- Offer Profile
- My name is Kamil and
I believe, my time as robot builder has come. I have good work, almost 5
years (since 2007) of professional programming experience, I’ve tasted lot
of different technologies – and the Spirit Junior was born.
At this time the first version of Spirit Junior is fully completed – six wheeled Ackerman with space for 15” laptop and 5l beer barrel.
Product Portfolio
About me
- My name is Kamil, i was born in 1987 and I work as a
Java developer in Procus. In the free time I’m enthusiastic robot builder,
Haruki Murakami reader, pizza eater and FC Barcelona fan. I’ve tried to
built few robots in the past, but I always failed – too little money, too
little experience and small programming apparatus…
I believe, my time as robot builder has come. I have good work, almost 5 years (since 2007 ) of profesional programming experience, I’ve tasted lot of different technologies – and the Spirit Junior was born.
I intentionally choose name after the Spirit Mars exploration rover, that is now deceased, and is in my opinion greatest achievement of mankind (today Curiosity is still in JPL facilities). At this time the first version of Spirit Junior is fully completed – six wheeled Ackerman with space for 15” laptop and 5l beer barrel.
This blog is about rebuilding current six wheeled Ackerman bogie to six wheeled rocker-bogie, just like original Spirit had.
The Inception
- This is image of Spirit Junior rover in fourth quarter of 2011. My plan is to build a rocker-bogie suspension and get to the competition in late summer 2012.

- Current robot configuration:
- Bogie from 1:8 Rock Crawler with two 540′s DC motor
- Custom laser cut alloy parts
- Compass, GPS
- Five ultrasounds
- Two webcams to detect road edge
- Wide angle webcam in the back
- MS Kinect
- Arduino Duemilanove to interface notebook and sensors
- 7.2 NiMH battery to power motors and servo
- 10.8 NiMH to power Kinect and Arduino
- All parts including bogie are custom made
- Three axis magnetometer/accelerometer/gyro
- Six high torque BLDC motors
- Six ultra high torque servo
- Current robot configuration:
Result

3 MONTHS OF DEVELOPMENT
Sptit Junior in March 2011 was just a 1/8 scale Rock Crawler...

8 MONTHS OF DEVELOPMENT
Spirit gained third pair of wheels, tower for sensors, space for notebook and 5l barell..

9 MONTHS OF DEVELOPMENT
Three cameras, Kinect, GPS, compass and many more are now fully interfaced with controll

MARCH 2012
Spirit Junior has now new drive - the rocker bogie...

Hello World, my name is Junior, Spirit Junior
- Me presenting Junior

Getting the silver - not bad for robot that didn't move at all
Blog
Written on October 22, 2011
- First step to SJ v2
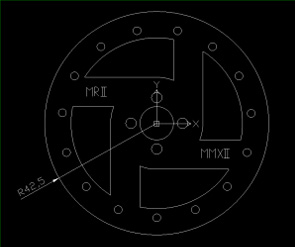
I have finished the semi-final version of rims for new bogie. It will be made of 2mm thick steel plate. On the image bellow is drawing from DraftSight, that will be then exported to DWG file that is requested by the laser cutting company
Written on October 26, 2011
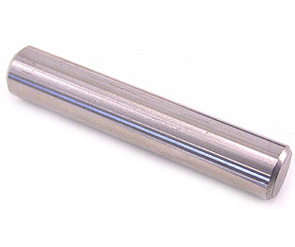
- Main Shaft Holder
I’ve just finished part that fix shaft to body of the robot. As there will be quite big forces, holder needs to be tough so I’m thinking about 3mm thick steel. Bellow is the image of the key shaft, that has 3/8” diameter, and should be 460mm long.
Written on November 3, 2011
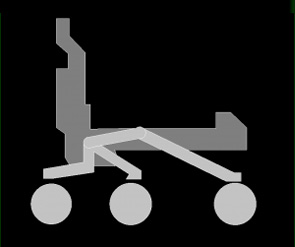
- Designing the rocker bogie really is hard…
So just half hour ago I told to myself to stop doodling and start engineering. And so the first draft was born. It is again drawn in draftsight and rendered in paintbrush…

Written on November 13, 2011
- Week 45 part three
Another part is designed and ready to be produced – Outer Fixing ring that will hold tire against outer ring. As a tire I plan to use standard 1/8 truggy tire.
The fixing ring will press tire sidewall against the outer ring. This way tire will be fixed strongly and still can be replaced quite easily. Between skeleton of wheel and tire will be placed foam supporter to absorb shock.

Written on December 9, 2011
- Two weeks to christmas…
All six wheels will be individually steered. The robot will weight around 15kg so pressure on the steering part will be heavy. I was thinking about lot of ways how to do this, but all was in the end unusable. Then I found perfect part for this task – the Servocity’s tube servo powered gearboxes. They provide more then enough power to steer on any surface and still are light and have small power consumption. There will be 6 of these on robot.
Written on December 13, 2011
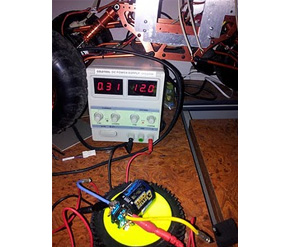
- Small test of new motor
I did a simple test with my new motor – LRP Truckpuller 3, and it seems I made a good choice. Not only these motors looks great ( in opposite to silver cans ), they have really quality feeling ( German manufacturer ) and last but not least they have high torque and really small power consumption. On free spin it is 300 mA, when I put shaft under pressure it jumped to 450 mA – with planned 12Ah battery it should work whole day…

Written on January 19, 2012
- Eureka! Newly ordered tires work!
As I wrote in previous post, I was awaiting new set of tires as the old one were too small. It took some serious effort, but they fit and they fit tight. Perfect!

Written on February 1, 2012
- Good news everyone!
I keep receiving postal packages everyday – last week it was aluminium profiles, camera, one miter gear; this week it were 2 other miter gears, 3 dual motor drivers, 6 planetary gearboxes ( 1:26 ratio ).
As the water-beam-cutter parts should be finished just about now, this might not be last post for today…
Written on February 6, 2012
- Week 6. – the construction
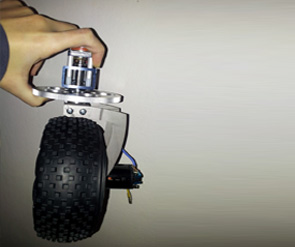
as I have all the parts I need, I started the construction of rocker-bogie. I wish there was a little warmer outside, it would speed up the whole process. As first I tried to put together the wheel setup, that in this case contains servo power gearbox for steering, DC motor and 1:26 planetary gearbox for propulsion. Six of these should give an unprecedented ( for me :) ) maneuverability for my Spirit Junior. The first prototype suggest it could work! What I’m especially proud of, is that the gearbox is fully covered by the wheel as planned, the DC motor sticks out less than 50mm.
Written on February 25, 2012
- Another busy Saturday
I’ve been working all day, so I’m glad there are some visible results…
Written on February 27, 2012
- Another step right direction
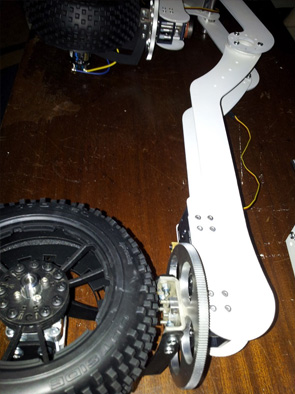
the post I made on Saturday, was actually my last project-related thing I did that weekend – I got sick, probably due to overworking … So I took day off and the result is I have the other arm finished, and I feel sick again…
It is a lot heavier than I expected it to be, to my luck motors have a lot of spare power too…

Written on March 10, 2012 at
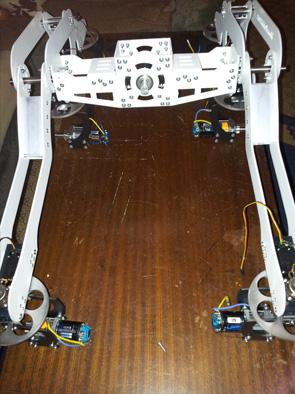
- Hello World, my name is Junior, Spirit Junior
after busy Saturday, I have some results I want to share. On the image is Spirit Junior in the current state. Almost all parts are on place – only arm is not there because some of the parts for it were faulty ( because of faulty blueprints of course, Tatrarez did great job as always ).