Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> École de technologie supérieure (ÉTS)
École de technologie supérieure (ÉTS)

Videos
Loading the player ...
- Offer Profile
- The Control and Robotics Laboratory at the École de technologie supérieure (ÉTS) in Montreal regroups more than 30 members, four of which are professors. Working jointly with industry and various research centers, CoRo concentrates its activities on applied research. The laboratory is equipped with the state-of-the-art infrastructure, including several industrial robots, a robot arm, a laser cutting machine, various parallel robot prototypes, microscopes, and a wide range of metrology instruments.
Product Portfolio
Research areas

- The CoRo laboratory’s research efforts are focused on
the following areas:
- Precision robotics
- Parallel robotics
- Mechatronics and haptics
- Control
Precision robotics
- Most users of robot manipulators in an industrial
setting are content with the excellent repeatability of their movements.
Today, an industrial robot’s effector can reach a previously taught pose
(position and orientation) with a position error below 0.1 mm. However, in
some applications, the poses to be attained are computed rather than taught,
in which case absolute accuracy is also required.
The most cost-effective way of improving the absolute accuracy of robots is through calibration. While various commercial solutions are indeed available for calibrating robots using metrology devices, the fact is that even the least expensive of them still cost several thousand dollars. Furthermore, for various reasons, these solutions do not meet the needs of all users (lack of space in a robotic cell, lack of budget to buy a three-dimensional measurement device, etc.).
While the aerospace sector is probably the most demanding in terms of precision robotics, it is paradoxically also the least well served. This sector has a particularly pronounced and active presence in the Montreal region, where several international companies, including Pratt & Whitney, GE Aviation, Messier-Dowty, L-3 MAS and Bombardier Aerospace, use industrial robots for precision tasks.
Development of robot calibration methods
The CoRo laboratory is equipped with a wide range of metrology devices:- three-dimensional measuring machine (Mitutoyo)
- laser interferometer system (Renishaw)
- laser tracker (Faro)
- measuring arm (Faro)
- ballbar (Renishaw)
- probe (Renishaw)
The first method developed at the CoRo laboratory is based on the use of a laser tracker to calibrate a classical six-degrees-of-freedom serial robot. Experimental work was carried out on an ABB IRB 1600 robot, and its maximum positioning error in its entire workspace was reduced to below 0.850 mm. Measurements were conducted automatically by controlling the laser tracker and the robot through a local Ethernet network, from Matlab.
A second method has been developed to calibrate one of the parallel robots designed at the laboratory, PreXYT, using a measuring arm (or any 3D coordinate measuring machine). This robot’s maximum positioning error has been reduced to below 0.050 mm.
Other calibration approaches have also been explored, including the calibration of serial robots using a probe, and the calibration of a Moog hexapod using a laser tracker. The CoRo laboratory is currently exploring the use of C-Track, a dual-camera measurement device by the Quebec manufacturer, Creaform. This optical device allows the real-time measurement of the robot's effector pose, and can thus possibly be used not only to calibrate robots, but also to guide them dynamically. 
Calibration of a serial robot with a laser tracker
Calibration of a parallel robot with a measurement arm
Parallel robotics

- In addition to the ubiquitous serial industrial
robots, other types of manipulators are also available, called parallel
robots. A serial robot is basically a series of links connected by motorized
joints, while a parallel robot is comprised of several series of links, with
most of their joints not motorized.
Parallel robots can be faster, more rigid and/or accurate than serial robots. Like almost all motion simulators, most rapid pick-and-place robots are parallel robots. Many precise positioning devices are also parallel robots.
Through his website ParalleMIC and his research on the kinematic analysis and design of parallel mechanisms, Professor Ilian Bonev is renowned in the area of parallel robotics. He leads most of the R&D work involving parallel robots conducted at the CoRo laboratory, where the work breaks down into three categories: theoretical work, mechanical design and simulation software development.
Theoretical work
The following are the main theoretical areas Professor Bonev is interested in:- study of the singularities and workspace of parallel robots;
- geometric design of new parallel mechanisms with large workspace and few singularities.
Mechanical design
At the practical level, Professor Bonev is mainly interested in the mechanical design of new parallel robots with large workspace and high absolute accuracy (see Precision Robotics section) or for very specific applications. In both cases, industrial grade prototypes are designed and produced at the ÉTS. The controllers for these prototypes are generally developed by Professor Pascal Bigras (see Control section).
The robots are designed using CATIA, SolidWorks and ADAMS software. Parts are machined at the Laboratoire institutionnel de fabrication de l’ÉTS (ÉTS’ Institutional Manufacture Laboratory) which houses 21 machines, including seven NC machining centres. Following proper training, CoRo members are able to use most of these machine-tools independently.
The fourth prototype is a cable-actuated robot, which is driven by eight motors. This project is currently under development.
Development of simulation software
Professor Bonev is also interested in the design of simulation software for parallel robots. He has designed a series of Java applets, and will be designing a software application for the simulation of Delta robots. This type of work is intended primarily for students registered in the Projet de fin d’études course, foreign interns, or anyone wishing to work on an as-needed contract basis. Candidates must be highly skilled in C++ and well versed in the OpenGL library and the Qt GUI toolkit. 
PreXYT, XY-Theta parallel robot
- The first prototype developed at the CoRo laboratory is an XY-Theta precision positioning table, called PreXYT (for Precision XY-Theta table). This is a new singularity-free three-degrees-of-freedom parallel robot with very simple kinematics. The robot was designed for the precision positioning of silicon wafers, and its effector can cover a circular zone 170 mm in diameter, with any orientation between -17° and 17°, and an absolute positioning error under 0.050 mm.
DexTAR, XYZ parallel robot
- The second prototype, called DexTAR (for Dextrous
Twin-Arm Robot), is a rapid pick-and-place XYZ robot, based on a 5-bar
mechanism. Its originality lies in the fact that the robot can reconfigure
itself dynamically to maximize its workspace (by crossing serial
singularities).

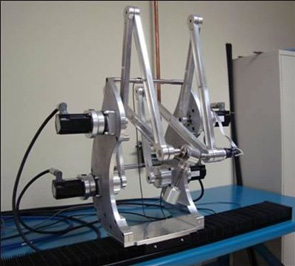
MedRUE, six-degrees-of-freedom parallel robot
- The third prototype is a six-degrees-of-freedom robot called MedRUE (for Medical Robot for vascular Ultrasound Examination), which is used to analyze the arteries of the lower limbs. The robot will perform diagnoses of the stenosis using an ultrasound probe. This project, which is currently under development, is being carried out in collaboration with the Hôpital Notre-Dame, a part of the Centre hospitalier de l’Université de Montréal (CHUM) network.

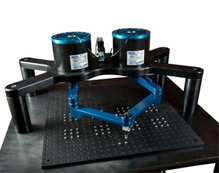
MicARH, rotary hexapod for micropositioning
- The fifth prototype is a rotary hexapod called
MicARH (for Micropositioning Agile Rotary Hexapod). This project is
currently under development.
Control

- R&D control activities at the CoRo laboratory are led
by Professors Pascal Bigras, Vincent Duchaine and Guy Gauthier, and are
focused on several areas.
Robot control
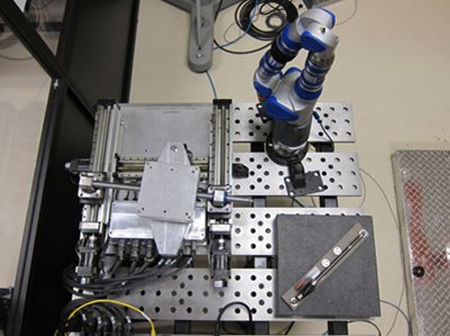
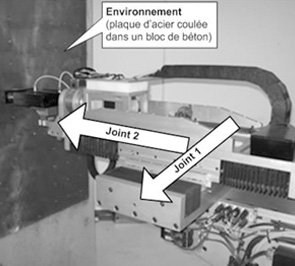
One of the projects in this area was carried out at the NSERC’s Aerospace Manufacturing Technology Centre, and covers the modeling, design and implementation of control algorithms for industrial robots whose tool is in contact with the environment. A model that takes into account the robot’s geometry, the elasticity of its joints as well as its position controller response has been proposed in order to optimize the design of force and impedance control.
A medical robotics project is being carried out in collaboration with the Hôpital Notre-Dame, a part of the Centre hospitalier de l’Université de Montréal (CHUM) network. Diagnosing arterial diseases often requires precise three-dimensional images. The echography technique, which is non-invasive and inexpensive, provides precise cuts of sections of the arteries where the probe is located. A three-dimensional model can thus be obtained from a set of ultrasonic scanners, which together allow enough cuts along the artery to allow a three-dimensional reconstruction. In this project, a secure robotic controller is currently under development with a view to automating the capture of 3D ultrasound images of the lower limbs.
Several projects are currently under development, in collaboration with Hydro-Québec's research institute. These projects are aimed mainly at the robotic reconstruction of hydro-electric dams, which should bring in substantial savings, considering that manual reconstruction would require the draining of the dam in order to ensure workers' safety.
A project for the development of a non-linear ergometer is underway thanks to a collaboration with Professor Rachid Aissaoui of the LIO and the Institut de réadaptation de Montréal. This ergometer, which is based on impedance control applied to direct drive motors combined with instrumented wheelsets, allows a faithful reproduction of the sensation of a wheelchair for the user, not only for linear pathways, but also during curvilinear movements. The control law will soon be extended to allow users to learn to better propel their chairs in a way that prevents pain in their shoulders.
Control of positioning systems with friction
In this research area, new dynamic friction models are studied with a view to improving the precision of the control of positioning systems with friction. The identification of these models, as well as the design of control laws based on the passivity and the formalism of matrix inequalities constitute the core of these studies.
Several robust control and identification algorithms have already been proposed and successfully implemented for various positioning systems, such as constrained robots and pneumatic actuators.
Iterative learning control (applied to thermoforming process)
This control approach applies to repetitive processes, such as chemical vapour deposition processes. Because this process is repetitive, the measures carried out on the preceding batch can be used to correct the next batch to be produced, and thereby optimize the production quality. This control is applied on a thermoforming oven in order to allow the automatic adjustment of the temperature setpoints for heating elements, allowing the thermoformed plastic sheet surface temperature to match that of a desired profile.
Designing a control algorithm by iterative learning is complicated by the fact that a thermoforming oven is a non-linear system equipped with many inputs and outputs. Steps must also be taken to ensure that the convergence of the temperature setpoints to their ideal values is monotone, and that the control remains robust even in the presence of variations in the process parameters and in the environment parameters. A mathematical thermoforming oven model is used to test these control algorithms.
To try to facilitate the design of a robust design algorithm, Professor Gauthier combines mixed sensitivity methods (based on H-infinity) and the Mu-analysis method with the internal control and genetic algorithms. Some methods, including the Mu-synthesis method, provide robust control algorithms from iterative learning, but implementing the algorithms will be a complex endeavour. However, since the controller structure is determined from the get-go, it is easier to analyze the robustness. The controller can thus be synthesized using optimization algorithms such as those that are genetically-based. Professor Gauthier anticipates adapting this design method to non-iterative robust controls.
Finally, Professor Gauthier has developed a control design approach involving an internal model and using fuzzy logic. A fuzzy model of the process can be obtained from the measures carried out on the process, and the reverse of this fuzzy model can be integrated into the iterative learning control algorithm. 
KUKA robot with force control unit
Echography robot under development
Underwater grinding robot

Thermoforming oven

Thermoforming oven
Mechatronics and haptics
- The CoRo laboratory has expertise in the areas of
mechatronics and haptics. Research on this branch of robotics is carried out
mainly by Professor Vincent Duchaine and his team. This broad category
comprises work in the areas of physical interaction between humans and
robots, the development of sensor technologies and the design of haptic
devices.
Physical interaction between humans and robots
Physical interaction between humans and robots is a relatively new area of robotics, and is aimed at bringing humans and robots to share the synergy of a common workspace. This evolution would seem to be a natural step towards more advanced robotics, and lies halfway between today's industrial robots and the versatile humanoid robots of tomorrow. This possible future coexistence has the potential of having a significant impact on several areas associated with everyday life, such as rehabilitation, robot-assisted devices or assisted surgery. In addition to these three fields of application, the greatest impact of such an implementation should likely be in manufacturing. An effective synergy between humans and robots can be contemplated by marrying the remarkable capacities of humans to reason and to adapt to unstructured environments with the inexhaustible strength of robots.
Professor Vincent Duchaine is particularly interested in the challenge posed by fitting these robots with the capacity to intuitively interact with humans through the creation of the appropriate control algorithms. This involves work carried out on variable impedance control and on the development of collision reaction strategies.
Sensor technologies
Professor Duchaine’s team is also interested in creating new sensor technologies for various robotics applications. It is working actively to create low-cost multi-axis load transducers, to design touch sensors, and develop a touch layer for use as an artificial skin for robots. These technological developments are attributable to the emergence of new robotics applications in which robots get to perform more complex tasks and evolve in less structured environments.
Haptic devices
Professor Vincent Duchaine and his team are currently working to create portable haptic interfaces allowing hand amputees to regain their sense of touch. Beyond the simplified mechanics which restricts the gripping ability of current prosthetic devices, the inability of such devices to perceive and transmit exteroceptive and proprioceptive information makes them that much more difficult to control. This lack of information has a negative impact on amputees’ ability to perform certain daily tasks, and requires constant monitoring of prosthetic devices. 
Robot-assisted drawing

Multi-axis load sensor mounted on Willow Garage PR2 robot
Artificial skin for robot
Infrastructure
- The Control and Robotics Laboratory (CoRo) is situated on the third floor of Pav. A of the ÉTS. The main room, A-3566, is equipped with 16 workstations. The adjoining room, A-3569, houses a robotic system and metrology equipment.

Room A-3566

Room A-3569
The following are the main pieces of equipment available at the CoRo

IRB 1600 industrial robot, ABB
- The robot’s cell is equipped with a 60,000 rpm spindle (SLF HF), an electric gripper (Schunk PG 70), an electric actuator (IAI), and a probe (Renishaw LP2). Four other robots of the same model are used in Professor Ilian Bonev’s teaching laboratory

Universal gripper, Robotiq
- The Robotiq arm is a smart gripper that can automatically
adapt to the shape of an object. This arm was donated by the manufacturer,
Robotiq.

IRB 360 industrial robot (FlexPicker), ABB
- The robot is built into a cell with three conveyors and a camera

Visualeyez VZ 4000 motion capture unit, PhoeniX Technologies

Faro laser tracker ION, Faro Technologies

FaroArm Platinum, Faro Technologies

XL-80 laser interferometer system, Renishaw

QC20-W ballbar system, Renishaw