Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Bielefeld University
Bielefeld University

- Offer Profile
- What are the basic building
blocks of cognition and learning? How can we endow robots with some social
competence, to make them acceptable as assistants to humans? How can
machines communicate smoothly and on semantic levels with humans? Such
important yet unsolved persistent research questions have been guiding
Bielefeld researchers in the key area of Interactive Intelligent Systems for
many years.
Product Portfolio
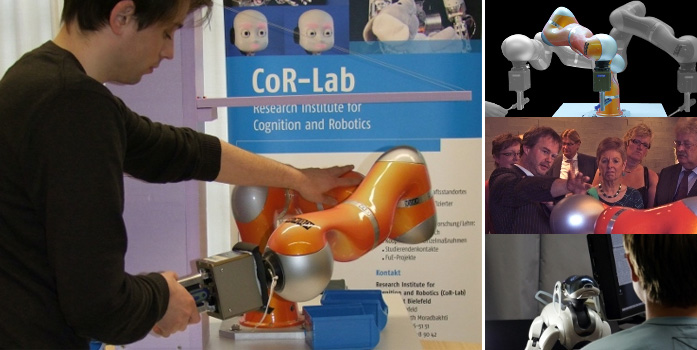
The "Research Institute for Cognition and Robotics - CoR-Lab"
-
What does CoR-Lab offer ?
- Technology transfer
- Talks and presentations on cognitive and learning technology
- Training of highly-qualified personnel
- Cooperative FuE projects in research and teaching
- Information exchange
- Cooperation in individual measures
- Contact for students projects
The participating research groups in CoR-Lab are widely known for their work in artificial cognition, computer vision, neural networks and machine learning, and human-robot interaction. They are in command of a unique wealth of robot platforms including two humanoid iCub robots, several Nao robots, anthropomorphic robot hand, Kuka LWR compliant arms, a bionic handling assistant, and further service robots.
The acquisition of competencies in these wide fields of intelligent systems technology since its inauguration in 2007, and its growing focus on applied research enables CoR-Lab to serve more and more as a center for the transfer of advanced intelligence technology from fundamental research towards industrial application in the region Ostwestfalen-Lippe. Through joint projects with regional industry partners it supports the domestic medium-sized economy by organizing transfer of excellent research, e.g. in a transfer chain reaching from the Bielefeld Center of Excellence in Cognitive Interaction Technology CITEC through CoR-Lab to application partners. With this aim, CoR-Lab also takes the lead for Bielefeld University’s contribution to the BMBF Spitzencluster it’s-owl (Intelligent Technical Systems).
Projects
it's OWL
- Add Intelligence to Machines.
High-tech for tomorrow’s markets. A technology network encompassing economy and science about to set world standards for intelligent products and production systems is growing in OstWestfalenLippe. The cluster Intelligent Technical Systems OstWestfalenLippe – in short, it’s OWL – is regarded as a pioneer for Industry 4.0 and makes important contributions to Germany’s competitiveness as an industry location. Having been awarded in the Leading- Edge Cluster Competition of the Federal Ministry of Education and Research, is a seal of quality for it’s OWL.
174 companies, research institutes and organizations cooperate within the it’s OWL network. In a joint effort of economy and science they approach the innovation leap from mechatronics towards Intelligent Technical Systems. World market leaders in the fields of mechanical engineering, electrical and automotive supply industries collaborate with top-level research institutes.
45 projects with a total budget of 100 million Euro will develop technologies for new generation products and production systems – ranging from automation and drive solutions to machines, vehicles, household appliances to Smart Grids and networking production plants.
The Federal Ministry of Education and Research sustains these activities with 40 million Euro.
The technology platform will be made usable for numerous producing companies. This is a strong impulse for growth and employment in the OstWestfalenLippe region.
Technology Concept
Resulting from a joint effort of engineering sciences and informatics Intelligent Technical Systems- interact with the environment and adapt autonomously (adaptive),
- cope with unexpected situations in a dynamic surrounding (robust),
- anticipate the effects of diverse influences on the basis of experiential knowledge (anticipatory),
- and consider individual user behavior (user-friendly).
- help creating new functionalities of products and production systems and provide easier handling for users,
- improve development, installation, maintenance, and life cycle management,
- improve reliability, safety, and availability,
- provide for a more efficient use of resources like energy and materials,
- and allow for individualized and changeable production processes.

FlexIRob - Motion Learning At Your Fingertips
- Enabling robots to become co-workers that collaborate
with humans efficiently and in safely is a major goal of current robotics
research. At Bielefeld University's CoR-Lab, researchers use learning and
interaction technology for control of compliant robots such as the KUKA
Lightweight Robot (LWR) to realize such human-robot interaction. Research
results are continuously integrated in the showcase robotic system
“FlexIRob” providing a testbed for flexible robotic co-worker and advanced
human-robot collaboration scenarios.
In its current setup, FlexIRob allows to teach a redundant robot various Nullspace constraints in different areas of the workspace. Users with no particular robotics knowledge can perform this task in physical interaction with the compliant robot, for example to reconfigure of a working cell environment. After a short training phase, the learned adaptive mapping solves the inverse kinematics problem of the robot. It is embedded in the motion controller of the system, hence allowing for execution of arbitrary motions in task space, respecting the learned Nullspace constraints. This is a large step towards our vision of a flexible robotic coworker system, because it avoids the complex manual programming that standard methods for this task have previously required.


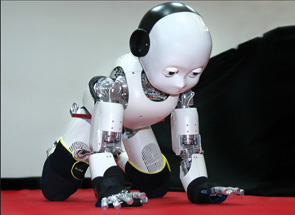
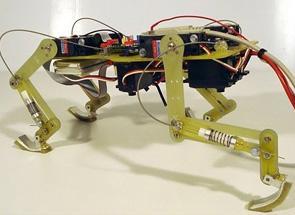
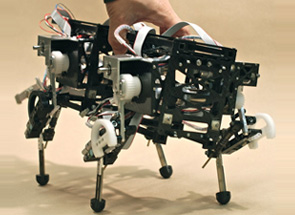
AMARSi - Adaptive Modular Architectures for Rich Motor Skills
- AMARSi is a EU-funded research project in the Seventh
Framework Programme. The project is a large scale integration project hosted
in the category Information and Communication Technologies , unit E5:
Cognitive Systems, Interaction and Robotics .
Motor skills of humans and animals are still utterly astonishing when compared to robots. AMARSi aims at a qualitative jump in robotic motor skills towards biological richness. AMARSi' objective: the experimentation and demonstration of rich motor skills on the iCub humanoid robot and on the quadruped Oncilla. Rich motor skills in robots will have a tremendous impact on our society. Dexterous and skillful motion in robots will make them more suitable for a large number of tasks. The compliant and natural movements will make them blend into everyday routines, safe and psychologically acceptable.
Research in AMARSi focuses on three main areas: biology, robotics and software methods. Seven research subjects (or Work Packages) are tightly integrated.- Human Motor Primitives - Work Package 1
- Compliant Systems - Work Package 2
- Morphological Computation - Work Package 3
- Adaptive Modules - Work Package 4
- Learning - Work Package 5
- Architectures - Work package 6
- Robotic Experimentation - Work package 7
- Dissemination and Training - Work package 8
- Management and Coordination - Work package 9
Research Groups
Cognitive Robotics and Learning
- The research group is organized at the border of machine
learning, cognition and human-robot interaction. The ultimate goal is to
enable interactive learning in human-machine cooperation. The research group
investigates efficient and life-long learning methods for behavior
generation, motor learning and visual object recognition to maximize the
autonomy and adaptability of robotic systems. In particular, imitation
learning and bootstrapping processes are central research areas. Application
areas of this research group comprise behavior learning and generation for
ASIMO, iCub, the light-weight KUKA LWR robot arm and other robots, visual
online learning for object recognition, and autonomous learning approaches
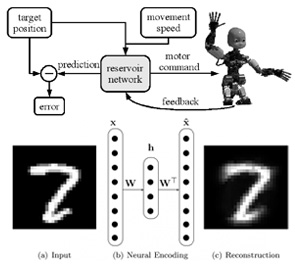
to generate complex time series including audio and video signals.
Main methodological foci are neural learning methods, in particular recurrent reservoir networks, and the transfer of other machine learning approaches to interactive scenarios, which require high computational efficiency and online-learning capabilities. Of particular interest in this domain are generative approaches to allow for behavior generation along with classification or prediction. Important methodological aspects of generative models are covered by the projects "ALEGRO" and "Theory of generative reservoirs".
The projects "Neural Learning of Flexible Full Body Motion" and "Goal-directed Imitation Learning from Humans" pursue the autonomous bootstrapping of motor control and skill acquisition by imitation learning. Central goal is to understand cognitive and developmental aspects related to motor learning and learning by imitation. The research group follows a synthetic approach to tackle important questions in this context by implementing computational models of these processes.
The research group also contributes neural learning methods and robotic experimentation to the FP7-IP large scale project AMARSi -- Adaptive Modular Architectures for Rich Motor Skills, which is coordinated by Prof. Steil.
Cognitive Systems Engineering
- Cognitive robotics is an experimental research activity
that combines research efforts in mechatronics, informatics and the
cognitive sciences. Creating cognitive robots requires building systems that
can adapt their behavior to environments that are complex, rapidly changing,
and that cannot be completely modeled in preface. Nowadays, many of the
resulting challenges can be successfully addressed on the level of
individual algorithms or by advanced robotics hardware tuned for specific
scenarios.
In order to provide an avenue for robotic systems to become useful in every-day human settings and as a prerequisite for entering the consumer market, these attributes must be ensured on a system level that encompasses the web of skills advanced robots must be capable of. The aim of the cognitive systems engineering group is to investigate software architectures and engineering principles that allow to efficiently integrate, implement and bring together this web of different skills in order to build complex cognitive robotic systems.
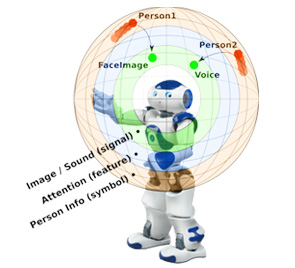
A fundamental prerequisite for mastering the (technical) integration of complex robotics systems is the availability and in-depth understanding of robotics middleware technology. For this reason and despite the availability of frameworks such as ROS, we decided to further develop a custom, but very light-weight and open robotics middleware termed RSB. This so called Robotics Service Bus (RSB) is an efficient message-oriented, event-driven middleware aiming at scalable integration of robotics systems in heterogeneous environments. It is fully open source and available for various operating system, featuring implementations for a number of popular programming languages. Due to our involvement in the HUMAVIPS EU project, specific platform support will be made available for the NAO humanoid robot at the HUMAVIPS Open Portal page. Please find more information and a comparison to ROS concepts at the corresponding project website.
Hybrid Society
- When taking the reasoning of current robotic research
seriously we have to face the possibility that in the future humans and
robots will live together in a shared environment and form a hybrid society
of natural and artificial agents. We can thus expect to see more and more
humans interacting with robots. This vision opens new research questions and
opportunities that we want to tackle in the research group „Hybrid Society“.
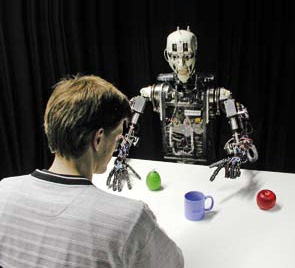
On the one hand, robots will be able to profit from interactions with humans. As humans are experts when it comes to understanding and handling tasks in the real world, they are a valuable source of information for robots. But how can robots make use of this information? In our group we target at enabling robots to be tutored by humans. Research has shown that adults provide specifically designed input to infants in tutoring situations. We expect to see similar behavior in human-robot tutoring situations provided that the robot displays a certain degree of social behavior. Based on such behavior we are currently determining ways for the robot to understand the meaning of a demonstrated action and to detect when an action is being demonstrated in order to be learned by the robot.
On the other hand, the main goal for robots is to help humans and support them in their daily activities. However, in order for robots to be really helpful they not only must be able to learn and carry out tasks and actions. They must also display socially acceptable behavior and be understandable and predictable for their interaction partners. This entails not only to the propositional content of an interaction as modelled by a dialog management component, which enables to build a common ground of shared information between the user and the robot. Also, the robot should be able to take the affective components of an interaction into account by reading the human’s emotional expressions and by producing appropriate emotional signals. We suppose that such an alignment of emotional behavior will make interaction with the robot not only more satisfying but also more efficient.
Technology Transfer

Technology Transfer
- Transfer and cooperative offers for enterprises
The next generation of intelligent robots will be used as assistants in the industrial range and will bring along own knowledge and abilities, which will allow them to act autonomously. The vision is a custom-made, industrial solution for enterprises with a maximum of variability, simple handling and flexibility.
This vision poses new challenges for man-machine cooperation and communication like security in interaction, and needs increased robustness, efficiency, accuracy and economy.
CoR-Lab aims to enhance the respective potential of learning and cognitive technology in the region East-Westphalia and Lippe (OWL) by cooperation with regional industry and offers to help enterprises increasing their competitive ability in this upcoming field of high-technology through joint workshops, FuE projects, and networking. The training of highly-qualified engineers in CoR-Lab's Graduate School also contributes to the innovative strength and the economic development of the region.