Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> KOREA UNIVERSITY OF TECHNOLOGY
KOREA UNIVERSITY OF TECHNOLOGY

Videos
Loading the player ...
- Offer Profile
The KUT BioRobotics Lab
Our research focuses on the interfaces between robots and biological systems, and our mission is to develop science, technology, and human resources in this area.
Our recent interest is human-robot haptic interfaces. Haptic interfaces are mechatronic (computer and mechanical) systems to allow human to feel and physically manipulate virtual or remote environment. Our specific interest is the design of haptic interfaces, improving the quality of haptic feedback, and dealing with the effects of delayed network transmissions for enhancing the realism of virtual and teleoperated environments.
Haptic interfaces has applications in many areas, including computer-assisted and simulated surgery, autonomous exploration of hazardous or remote environments, undersea salvage, enabling technologies, micro/nano manipulation, education and design. Sponsors of our work include KRF, ADD and MOCIE.
The group is led by Professor Jee-Hwan Ryu of the School of Mechanical Engineering at Korea University of Technology and Education.
Product Portfolio
Biologically Inspired Robots: Design and Control of Humanoid Robot
- HUMANOID ROBOTS "CREABO" and "ARES"
Humanoid robots "Creabo 1", "Creabo 2" and "Creabo 3" were designed in our lab. Robots include servo motors, microprocessor control module, bluetooth module, video camera, aluminum body, batteries and remote control system. 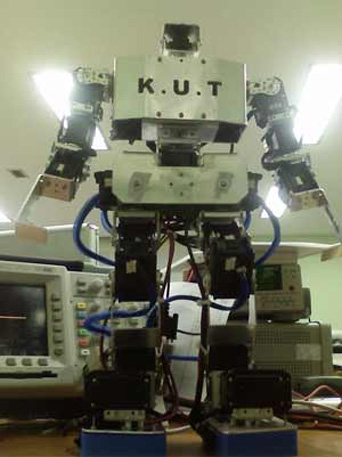
HUMANOID ROBOT "CREABO-2"
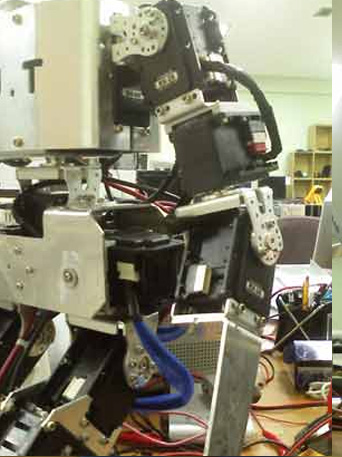
HUMANOID ROBOT "CREABO-2"
Mobile robots: TELEOPERATION
- In this research several interfaces for teleoperation
of a mobile robot are described and analyzed.
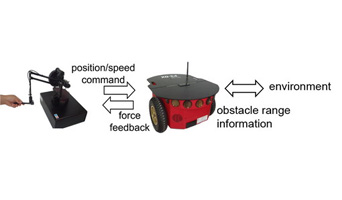
We consider teleoperation of a wheeled mobile robot when control commands are given by human operator through a master device. Phantom Premium 1.5A from SensAble Technologies, Inc. was used as a master device. We implemented our control ideas to the Activmedia Pioneer 3-DX mobile robot.
CONTROL STRATEGIES
Position-speed and position-position command strategies were used for mobile robot teleoperation. In position-position strategy desired speed of a mobile robot is defined by a master manipulator’s position. In position-speed command strategy robot’s position is controlled by position of master device. Hybrid command strategy, combining position-speed and position-position strategy, is introduced.
FEEDBACK INFORMATION
First, unilateral teleoperation was studied. Experiments with position-speed, position-position and hybrid command strategies were evaluated.
Second, bilateral teleoperation of a mobile robot was studied using two types of force feedback: force feedback related to obstacle range information, and force feedback including information about the state of the robot. For experiments with bilateral teleoperation different command strategies were applied.
The role of vision feedback was verified also. For each type of human-robot interaction interface advantages and disadvantages, and possible applications were described.
Audio information was also introduced as one of the possible types of feedback for teleoperation systems. Sound system was used to inform the human-operator about the obstacle in front of the robot. Intensity of this signal was increased while the robot was approaching to the obstacle. The role of sound feedback is to give additional information about the remote environment, so that the probability of collision will be decreased.
MAIN RESULTS
Research showed importance of different types of feedback information according to the application area of the teleoperator system. Text feedback is important for representing state information of the robot. Vision system can provide complex information about the remote environment. Force feedback can provide human with obstacle range information in order to prevent collisions. Additional sound signals are important to give the user more feeling about the state of the teleoperation system.
Control strategies were another objective of our research. Proposed hybrid control strategy for mobile robot teleoperation showed better performance. Human-operator could navigate the robot more easier, faster and carefully.
Mobile robots: BUILDING INSPECTION
- The continuous health monitoring of super large
buildings is very important for preventing disaster and maintenance.
However, most of the health monitoring method of these days are mainly
depending on visual inspection method with the naked eye, and restricted to
the areas where inspectors can access. Also it has many additional problems
since lots of dangerous works have been mostly done by human.
In this research, we have developed an ubiquitous robotic system for autonomous health monitoring of super large buildings for solving above mentioned problems.
The developed robotic system can climb a slanted wall with 45 deg, can be remotely operated and have a wireless video transmission channel.
Main components are the following:
- onboard computer (Intel Pentium 933MHz);
- wireless communication card;
- microcontroller AT90CAN128;
- 4 DC motors, Maxon 60W;
- 4 motor drives (PI-control)
- 2 servo motors CX-28;
- USB Video Camera;
- batteries.


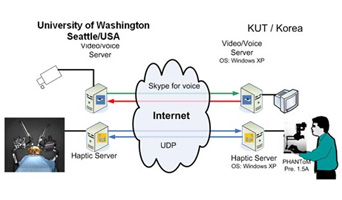
Medical Robots: SURGICAL ROBOT BILATERAL TELEOPERATION - VIA INTERNET UNDER TIME DELAY
- This is a joint research project with BioRobotics
Laboratory at University of Washigton (UW). BioRobotics Lab at UW has
developed a robotic system "RAVEN" for minimally invasive surgery.
More information about RAVEN surgical system can be found at UW BioRobotics Lab's web-site.
The goal of this project is to perform stable bilateral teleoperation of surgical robot. Human-operator (surgeon) is manipulating two haptic master devices. Control signals are sent to surgical robot via Internet. UDP communication protocol is used. Master devices are placed in Korea, while robot is situated in USA. 
RAVEN - Surgical Robot at UW BioRobotics Laboratory
Medical Robots: Micro Telerobot for Cell Manipulation
- Goal of this project is development of robotic system
for cell manipulation. It is a joint research project between BioRobotics
Laboratory and Center for Intelligent Systems of KUT.
Cell injection is very common task in modern bioengineering. Figure below shows cell injection process. Deformation of the cell can be used for estimating and generating force feedback, which is transmitted to the operator via haptic device.
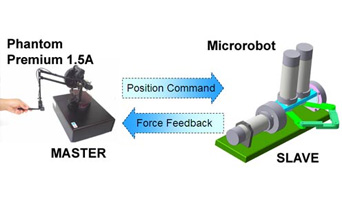
We are designing robotic system which is controlled by human via manipulating master device. Position command is sent to control system of micro robot which interacts with a cell. Cell deformation is estimated by vision system with the help of image recognition algorithm. Force feedback is applied to master device based on deformation. Application of force feedback in such kind of system improves efficiency and productivity of cell injection process. Phantom Premium is used as a haptic master device in our experiments.
Parallel kinematic structure is chosen. Microrobot has three active degrees of freedom. Maxon DC motors with built-in gears and encoders are used. Motors are controlled by Maxon drivers which are connected to NI Motion Control PCI card. Below kinematics, mechanical structure and a real robot are shown. 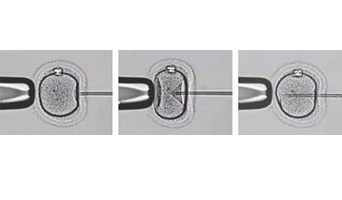
- Micro robot to interact with a cell
- Parallel kinematic structure is chosen
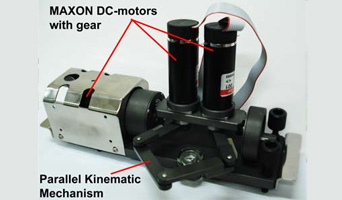
- Maxon DC motors with built-in gears and encoders are used
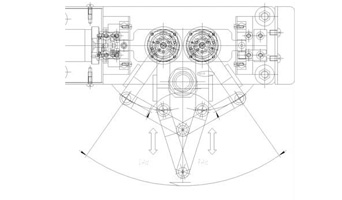
- Microrobot has three active degrees of freedom
Vehicular Robotics: WIRELESS VISION SYSTEM FOR VEHICLE
- This project is carried out under the corporation
between our lab and Hyunbo company. Our main objective is to develop a
human-vehicle wireless vision interface.
Nowadays, vehicle navigation systems are widely used. Vision information can be helpful to avoid the accident on the road in difficult and dangerous traffic.
Modern vehicle video camera systems based on wire communication which has several disadvantages. It is difficult and uncomfortable to setup, configure and fix such wire systems. These problems can be solved by applying wireless communication technology. Wireless part is based on the UWB (ultra wide band) technology.

