Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> The University of Rhode Island
The University of Rhode Island

- Offer Profile
- The URI Mechatronics Lab is coordinated by Mechanical, Industrial & Systems Engineering Professor Musa Jouaneh. The Lab provides state of the art facilities and experimental setups to learn and enjoy the field of mechatronics. Modern society depends on mechatronic-based systems for modern conveniences. From intelligent appliances to safety features in cars such as air bags, and antilock brakes, mechatronic systems are widely used in everyday life.
Product Portfolio
Research Projects
- Professor Jouaneh and his students had worked on many projects related to robotics, automation and precision motion control. Below are descriptions of some recent projects.
Automation of a Disassembly Operation
- The goal of this project is to develop intelligent
tooling and methodologies for automated disassembly of electronic devices.
As a first step, we developed a prototype of an automated system for the
disassembly of batteries from a family of electronic devices whose plastic,
snap-fit covers house AA or AAA batteries, such as remote controls and
calculators. Included in the development of the prototype system was the
design of a disassembly tool that uses three force sensing resistors to
provide force feedback information. The disassembly module was mounted on
the tool head of a three-axis translational motion robot, and a Visual Basic
application was developed to interface and control the robot with a Galil
digital motion controller. A model-based computer vision application was
also developed in Visual C++ using a Kinect sensor and the OpenCV library to
identify and localize the electronic device placed on the disassembly robot.
Using the information gathered by the model-based computer vision
application, the robot was able to use the disassembly tool module to
perform the necessary disassembly operations to remove the device’s snap-fit
cover and batteries.
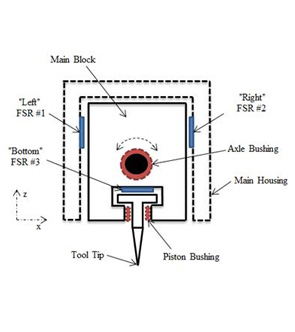
- Concept of the Disassembly Tool that Uses Force Sensing Resistors (FSRs) to Detect the Forces Applied to the Tool Tip
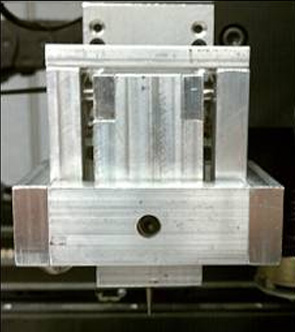
- Image of the Disassembly Tool

- Robot Platform for the Disassembly Tool. The Kinect Sensor is mounted on a Frame Above the Robot
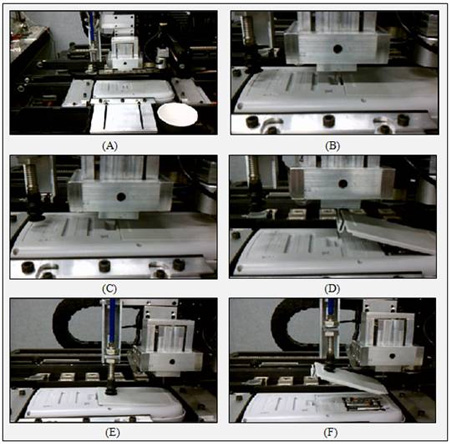
- Snap-Fit Removal Disassembly Sequence
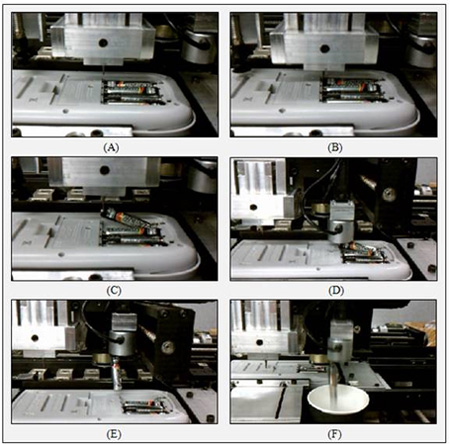
- Battery Removal Disassembly Sequence
Control and Coordination of Multiple Autonomous Mobile Robots in a Shared 2-Dimensional Workspace
- The goal of this project was to develop a method by which two or more autonomous vehicles may work simultaneously to complete a given task. In this case the task is to safely and efficiently travel to given goals in an unknown dynamic workspace that includes stationary and moving obstacles. The number of dynamic goals shall equal the number of robots in the system, and each robot shall track one goal. Each autonomous robot must be able to perform map building, localization, path planning, and position control in order to complete the task. The map building and localization is performed simultaneously through the use of a remote camera. Camera images are analyzed at a central PC, and the data is used by all robots. Localization is also performed through the use of motor encoder readings to update robot locations between camera images. Path planning is accomplished using a hybrid of potential field and fuzzy logic path planning methods. Position control of each of the robots is achieved using a PI feedback controller for robot speed and direction.

- Head-on collision avoidance of two robots using hybrid path planning in the real system
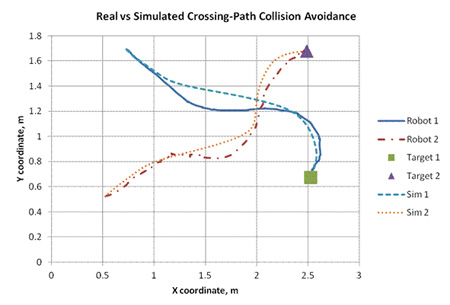
- Crossing paths collision avoidance of two robots, real vs. simulated
Energy Efficient Multi Mobile Robots Exploration
- The goal of this project was to develop a method for multiple robots to successfully explore an unknown environment that minimized energy consumed due to travel. The method was based on an algorithmic approach that is characterized by an iterative cost calculation, and utility based decision making. The developed method extends the algorithm developed by Burgard et al. (Coordinated Multi-Robot Exploration, IEEE Transactions On Robotics, Vol. 21, No. 3, June 2005) by taking into account the energy required to travel to exploration points. These explorations points are frontier goals which border un-sensed areas. The algorithm determines which frontier goal and associated energy cost offers the robot greater utility and plans a path to travel to the goal. Once the goal is selected, the algorithm lowers the utility of the surrounding cells to entice the other robots to explore new territory. A simulation software developed using Visual Basic Express was used to test the exploration effectiveness and cooperative characteristics of the developed algorithm. The results shows that the modified algorithm lowers both the travel time and the energy required for exploration.
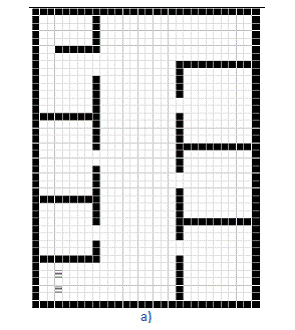
- (a) Exploration Environment to Be Explored by the Two Robots Shown at The Bottom Left Part of The Upper Figure. The Robot Sensing Distance is 8 Grid Units.
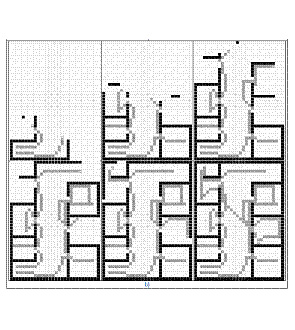
- (b) Replicated Burgard Method Exploration Path
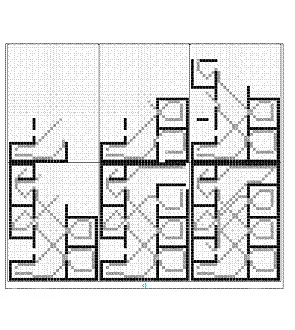
- (c) Modified Algorithm Exploration Path
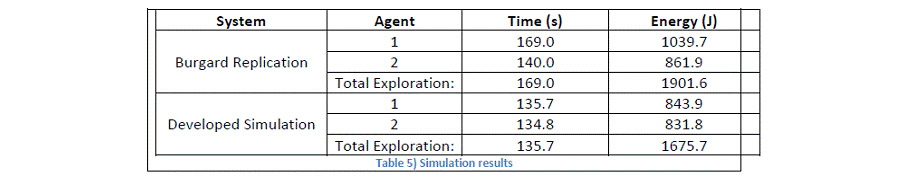
- Comparison of Travel Time and Energy Consumed for Exploration Performed using Burgard Algorithm and using the Modified Algorithm
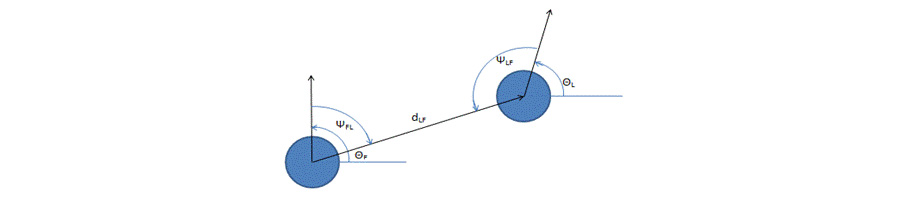
Formation Maintenance And Control Of Mobile Robots
- This project investigated the problem of formation maintenance and control of mobile robots. The goal was to develop a method that successfully allows mobile robots to successfully navigate in a particular formation to a goal while avoiding obstacles. The developed method was based upon the leader-follower formation technique and used a hybrid potential field/fuzzy logic navigation system. The developed method is meant to be decentralized; all inputs to the follower are from passive observations only. There is no communication between the vehicles. In this project, an overhead camera and a color recognition algorithm were used for localization of the robots, obstacles, and goal position. The two vehicles used were iRobot Creates and both were controlled by a central PC using a Bluetooth network. All software including the color recognition was written in Visual Basic.
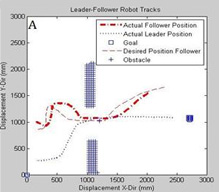
- (A) ψLFD = 90° dLFD = 600 mm
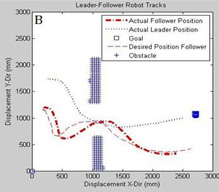
- (B) ψLFD = -90° dLFD = 600 mm
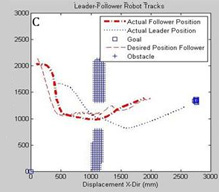
- (C) ψLFD = 135° dLFD = 600 mm
- (D) ψLFD = -135° dLFD = 600 mm
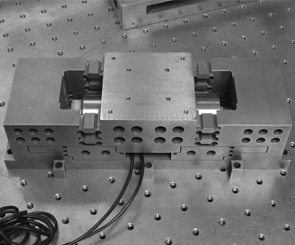
Modeling and Control of a Two-axis H-frame Positioning System
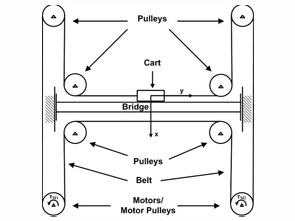
- This project focuses on the design, modeling, and
control of a belt-driven XY-positioning device constructed in the shape of a
capitalized H. The system uses one long timing belt, which wraps around the
whole system including the motor pulleys, to transform the rotational motion
of the motor shafts into a linear x-motion of a bridge and a linear y-motion
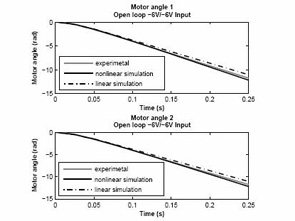
of a cart relative to the moving bridge. A non-linear 8-th order dynamic
model was derived to simulate the motion of the system. Several control
strategies are investigated to provide fast, precise control of the stage
position.
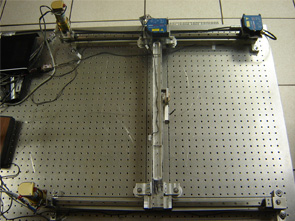
- Top view of H frame
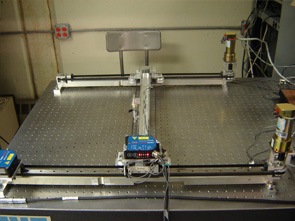
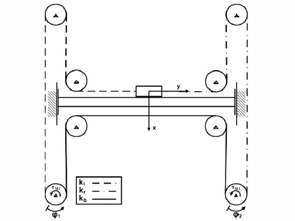
- Front view of H frame
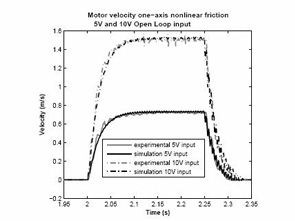
- One-axis open-loop response
- H frame components
- 8th-Order Model
- Two-axis open-loop response
Improvement of the Response of an Oscillatory System Using FIR Filters
- This project investigated the use of Finite Impulse Response (FIR) Filters as input shapers for under-damped systems. Input shapers decrease the overshoot and the settling time of underdamped dynamic systems. Three specific FIR filters were studied. These include: the boxcar, the triangle, and the half sinusoid. The three filter responses were compared to a normal step response, as well as a step response with a low-pass filter as a pre-filter. The comparisons were performed on a 2 nd order system simulated in Matlab/Simulink simulation software package as well as on a piezo-actuated fast responding stage. The data shows that the FIR filter can significantly improve the response of the system both in simulation and experimentally. The triangular FIR filter was particularly effective in the actual hardware implementation.
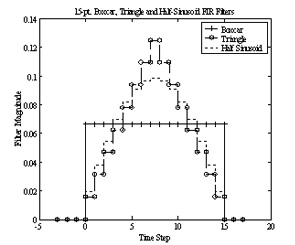
- Boxcar, Triangle and Half-Sinusoid FIR Filters
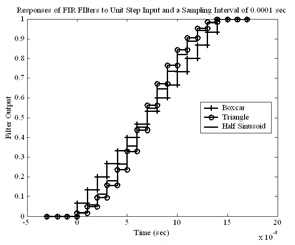
- Convolution of the Three 15-points FIR Filters with a Unit Step Input
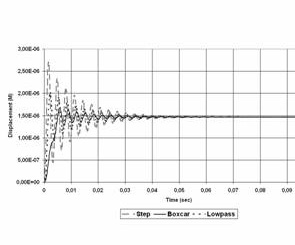
- Simulation System Response Curves due to a Step, Low-pass Filter and Boxcar FIR Filter Inputs
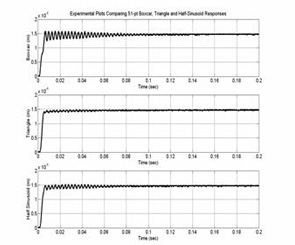
- H frame Experimental Open Loop Responses of the three FIR Filters
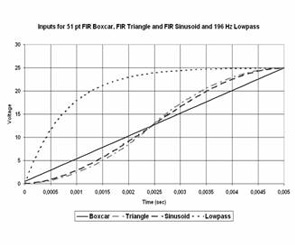
- Inputs Applied to Oscillatory System
- Experimental System: A Piezo Driven Flexure Stage
Other projects / educational setups
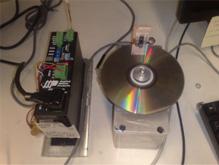
Stepper-Motor Driven Rotary Table
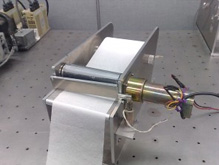
Paper Dispenser

Stepper-Driven Linear Positioning Stage

DC-Motor Driven Linear Actuator