Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Technical University of Lisbon (IST)
Technical University of Lisbon (IST)

Videos
Loading the player ...
- Offer Profile
- SR-Lisbon is a university based R&D institution where multidisciplinary advanced research activities are developed in the areas of Robotics and Information Processing, including Systems and Control Theory, Signal Processing, Computer Vision, Optimization, AI and Intelligent Systems, Biomedical Engineering. Applications include Autonomous Ocean Robotics, Search and Rescue, Mobile Communications, Multimedia, Satellite Formation, Robotic Aids.
Product Portfolio
Research Groups

VisLab: Computer and Robot Vision Lab
- The Computer Vision Laboratory - VisLab focuses on the research and development of tools based on computer vision, mostly for robotic applications. We are particularly interested in the problems of active vision, visual based control, motion analysis and segmentation.

DSOR: Dynamical Systems and Ocean Robotics Lab
- The work carried out in the lab is directed towards furthering knowledge in the general area of dynamical systems theory and applying it to the design and operation of autonomous marine and aerial robots. Theoretical areas of research include navigation, guidance, and control (NGC), mission control, and cooperative control of distributed autonomous vehicles. Strong cooperation links are being steadily forged with marine research institutes worldwide as marine science and oceanography become increasingly dependent on advanced technologies for ocean exploration. The lab is currently involved in a number of multidisciplinary projects using advanced robotic systems that include the Infante autonomous underwater vehicle (AUV), the Delfim autonomous surface craft (ASC), and the Caravela 2000 autonomous oceanographic vessel.

LaSEEB: Evolutionary Systems and Biomedical Engineering Lab
- The two main areas of this group are: Bio-Inspired Algorithms (BIA) and Biomedical Engineering (Biomed). Solutions found in nature inspire the development of search and optimization algorithms as Swarm Optimization (SO) and Evolutionary Algorithms (EA); modelling and simulation methodologies as Artificial Life (ALife) and Artificial Immune Systems (AIS). Neurophysiologic signal and image processing and Bio-informatics are the main topics of Biomed topic. Human Cognitive states detection and classification as Wake, Sleep, Drowsiness and Stimulus Related Responses. Further development is the cross interaction of BIA and Biomed areas.

IRSGroup: Intelligent Robot and Systems Group
- The research and development work carried out at the Intelligent Robots and Systems Laboratory (IRSLab) is wide in scope. Its members approach complex systems from a holistic standpoint, rather than focusing on some of the subsystems. The topic of cooperation (among agents and/or robots, among robots and humans) arises naturally from this viewpoint. The historic background of the lab senior researchers has lead us to use Artificial Intelligence concepts driven by formal approaches that stem from Systems and Control Theory and from Operations Research. We further believe it is very important to apply our methodologies to practical domains, as challenging real-life problems provide richer sources of inspiration.

SIPG: Signal and Image Processing Group
- Research at the Signal and Image Processing Group (SIPG) focus on the development of fundamental theory for signal processing on manifolds, e.g., performance bounds, optimization algorithms, filtering, manifold learning. Application areas are: wireless communications, including blind equalization and source separation; underwater, including acoustic communications and video compression and analysis; time-frequency analysis; image analysis, including statistical modelling; and video processing, including motion estimation, tracking of deformable models and inference of 3D structure.

SCTG: Systems and Control Theory Group
- The ISR Systems and Control Theory Group conducts fundamental research in all aspects of mathematical analyses and design methodologies, including interdisciplinary research efforts, involving modern system-theoretic concepts. Current topics under investigation include: robust multivariable control synthesis, distributed and decentralized estimation and control systems, hybrid systems, adaptive control using multiple-model concepts and hierarchical systems. Recent interdisciplinary investigations relate to the modeling of the human immune system using hybrid system concepts and modeling of the human vision system using hierarchical estimation methodologies.
ISR-CoBot

ISR-CoBot
- ISR-CoBot is is an experimental platform for research in
Human-Robot Interaction (HRI). It is a service robot for office environments
designed to perform tasks for users. The research is targeted towards a
robust platform capable of navigating in crowded environments. We aim at
robots that are aware of their own limitations, and are thus capable to
autonomously asking humans for help. This way we expect to get closer to the
goal of a symbiotic interaction between humans and robots.
The platform is based on a customized Nomadic Scout differential drive platform. Its equipment includes a touchscreen on a laptop for HRI and computing, an Hokuyo UTM-30LX laser range finder (range 30m), a Kinect RGB-D camera, and an IP PTZ camera.
(Jan 2014) participation of SocRob@home team, using the ISR-CoBot equipped with a 5-DoF arm, at RoCKIn Camp 2014, where we obtained the best-in-class in manipulation award
(Sep 2013) demos of ISR-CoBot at Pavilhão do Conhecimento during European Researchers' Night
s
People
Rodrigo Ventura -- principal investigator
Miguel Vaz -- MSc student
João Mendes -- technical staf
RAPOSA-NG

- Following the success of RAPOSA, the IdMind company
developed a commercial version of RAPOSA, improving it in various ways.
Notably, the rigid chassis of RAPOSA, which eventually ends up being
plastically deformed by frequent shocks, was replaced by semi-flexible
structure, capable of absorbing non-elastical shocks, while significantly
lighter than the original RAPOSA.
ISR acquired a barebones version of this robot, called RAPOSA-NG, and equipped it with a different set of sensors, following lessons learnt from previous research with RAPOSA. In particular, it is equipped with:- a stereo camera unit (PointGrey Bumblebee2) on a pan-and-tilt motorized mounting;
- a Laser-Range Finder (LRF) sensor on a tilt-and-roll motorized mounting;
- an pan-tilt-and-zoom (PTZ) IP camera;
- an Inertial Measurement Unit (IMU).
DSOR-Dynamical Systems and Ocean Robotics Lab

- "The Dynamical Systems and Ocean Robotics group works towards furthering the knowledge in the general area of dynamical systems theory and applying it to the design and operation of autonomous marine and aerial robots."
dsor projects
deno
- Title: DEvelopment of Nonlinear Observers
Summary: During the last few decades there has been an extensive study on the design of observers for nonlinear systems. An observer or estimator can be defined as a process that provides in real time the estimate of the state (or some function of it) of the plant from partial and possibly noisy measurements of the inputs and outputs and inexact knowledge of the initial condition...

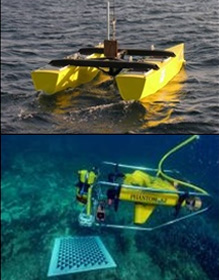
delfim
- delfim is a small autonomous catamaran. It has been
designed as a prototype vehicle to proof test the concept of an autonomous
surface craft capable of working in close cooperation with an autonomous
underwater vehicle.
elfim is 3.5 meter long and 2.0 meter wide and is propelled by two electric motors. Energy is stored in six 12V-55Ah lead acid batteries for propulsion and four 12V-12Ah lead acid batteries for payload (computers and sensors). Basic sensores to be installed on board the Catamaran are a DGPS, an attitude sensor and an echosounder.

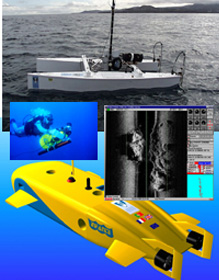
CARAVELA
- Development of a Long-RangeA
Autonomous Oceanographic Vessel
Worldwide, there has been increasing interest in the analysis of mesoscale ocean dynamics, that appear to old the key for correct descriptions and predictions of ocean system behaviour. However, due to the three dimensional characteristics of the underlying phenomena, the characterization of mesoscale ocean processes for numerical modeling and prediction purposes poses formidable challenges to ocean scientists. This stems from the fact that the space and time scales of the phenomena involved span ranges from 10km to 300km and a few days to some months, respectively. With currently available means, it is simply impossible to obtain oceanographic data with the space and time resolutions required for accurate ocean modeling. Thus the urgent need to develop advanced technological systems for cost effective, automatic ocean data acquisition.
ASIMOV
- Advanced System Integration for Managing the
Coordinated Operation of Robotic Ocean Vehicles
Three major stumbling blocks have so far prevented demonstrating the potential applications of Autonomous Underwater Vehicle (AUVs) to demanding industrial and scientific missions. Namely, i) the lack of reliable navigation systems, ii) the impossibility of transmitting data at high rates between the AUV and a support ship at slant range, and iii) the unavailability of advanced mission control systems that can endow end-users with the ability to plan, program, and run scientific / industrial missions at sea, while having access to ocean data in almost real-time so as to re-direct the AUV mission if required.
MORPH Project
- The MORPH project proposes a novel concept of an underwater robotic system that emerges out of integrating, albeit in a non-physical manner, different mobile robot-modules with distinct and complementary resources. It will provide efficient methods to map the underwater environment with great accuracy in situations that defy existing technology: namely underwater surveys over rugged terrain and structures with full 3D complexity, including walls with a negative slope.

DELFIMx
- Role
Surface module vehicle, MORPH positioning and communications.
Type
Autonomous Surface Vehicle (ASV)
Weight
400 Kg
The DELFIMx, first launched in 2007, has been thoroughly tested at sea and its autonomy and reliability have been instrumental in a number of national and EU funded projects. It has been used extensively in cooperative missions with other autonomous surface and underwater vehicles. It can maneuver at very low speed.

eFolaga
- Role
Slave Vehicle
Type
Hybrid AUV/Glider
Weight
31 Kg

MEDUSAS
- Role
Surface module vehicle, MORPH positioning and communications.
Type
Autonomous Surface Vehicle (ASV)
Weight
20 Kg
The MEDUSAS, first launched in 2010, has been thoroughly tested at sea and its autonomy and reliability have been instrumental in other projects. In previous missions, equipped with one acoustic modem, it collected data sets that are currently being used to test the efficacy of single beacon navigation algorithms. It can maneuver at very low speed. Two of these vehicles will be available to the project.
CADDY
- Search & recovery mission (S&R)
Before an underwater mission starts, both the diver and the CADDY system are "informed" about the mission plan and procedures. The CADDY system will guide the diver through the mission. Specifically, the scenario is to search an area in a lawnmowing pattern and recover a specific object. With the CADDY system, there is no need to perform conventional rope laying on the sea bottom; instead, the buddy will guide the diver underwater. During the S&R mission, the autonomous buddy has to
i) follow the predetermined path,
ii) ensure that the diver is following the buddy, i.e. execute cooperative algorithms with switching leaders, and
iii) keep an appropriate distance to the diver at all times in order to ensure diver safety and enable interpretation of the symbolic hand gestures and the diver behaviour.
At any time the diver can stop the mission, change the mission parameters, or command the buddy to perform compliant tasks. During the validation scenario, the diver will test the cognitive abilities of the CADDY system, i.e. behaviour interpretation, symbolic gesture interpretation, and reactivity of the diver.
Underwater archaeology mission
The diver is led by the CADDY system directly to the place where the previous diver has stopped with the documentation of the underwater site. There will be no need for the conventional positioning of frames on the seabed. When at the exact location, the diver starts with the archaeological mission (i.e. documentation of the site). While on the site, the diver will use hand gestures to command the buddy to perform some required tasks such as take a photo of a part of the sea bottom, make a mosaic of an area, direct light to a specific part at the sea bottom, etc. to alleviate the burden on the diver during the execution of a strenuous operation. This set of tasks will be defined in the project.
At all times during the excavation mission, the autonomous buddy has to
i) attain optimal positioning with respect to the diver in order to ensure diver safety, enable interpretation of the symbolic hand gestures and interpretation of the diver behaviour,
ii) accurately interpret commands issued by the diver and comply with the tasks requested, and
iii) adapt the mission plan according to the diver’s instructions.
The execution of the validation tasks will be assessed by the members of the CADDY Advisory Board and DAN Europe by referring to the following key performance indicators:
1.speed and success of diver behaviour interpretation;
2.speed and success of the buddy reaction to a change in the mission plan;
3.diver ergonomics – was the distance of the buddy appropriate during the mission?, was the diver safety area preserved during the mission?;
4.precision of path following (for both the diver and the buddy) during S&R mission and precision of path following during the descent to the underwater archaeology site; and
5.precision and compliance of the buddy operations during assistance to the diver.



ATLAS Project: Advances in Terrain-based Localization of Autonomous Submersibles
- The Project
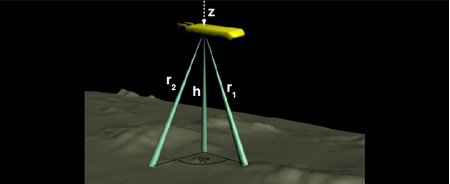
The main objective of the current project consists in the development of geophysical navigation (GN) methods with application to the navigation of autonomous underwater vehicles (AUVs). This approach to navigation relies essentially on matching the geophysical data acquired by a vehicle in real time with pre-existent maps of the area to be surveyed. It is an alternative, economical approach to dead-reckoning methods based on the integration of Inertial Navigation Sensor information and Doppler Velocity Logger data. One of the main advantages of GN is the possibility of eliminating the drifts that are inherent to the dead-reckoning methods. Geophysical Navigation is particularly well suited for the navigation of autonomous vehicles in areas that need to be surveyed repeatedly since the cost of acquiring the prior maps is diluted along time. As such, GN reveals high potential of application to oceanography in general and to marine geophysics in particular. This is an FCT project with the reference PTDC/EEA-ELC/111095/2009.
Introduction and Objectives
A great number of oceanographic missions consist of repeated surveys of the same area either for successive refinement of feature maps or for monitoring the evolution of the target environment along time. Examples of such missions include: marine surveillance in special areas of conservation; monitoring hydrothermal vents, mud volcanoes, and other geologically active areas of the sea-floor; habitat mapping; plankton sampling; mine detection and underwater archeology using sonar imaging and magnetometry; pipeline inspection; deployment of current profilers for sampling of small-scale ocean turbulence; inspection of scientific or industrial infrastructures.
Most of the repetitive tasks involved in these surveys can in principle be efficiently accomplished by Autonomous Underwater Vehicles (AUVs) provided that a reliable navigation system is available to estimate their position, velocity, and orientation, and to geo-reference the data acquired. Compared with other traditional methods, performing data acquisition with AUVs presents considerable benefits in terms of versatility, safety, operational costs, and quality of the data acquired. AUVs are ideal vehicles to execute missions that require 3-dimensional surveys in marine environments. Furthermore, because AUVs can penetrate the water column and maneuver close to the seabed in a controlled manner, they can acquire acoustic, magnetic, and vision data with a resolution that far exceeds that available with classical means.
One of the main advantages presented by autonomous underwater vehicles is the possibility of operating at depths where they are not affected by the environmental disturbances sensed by surface vessels or even by towed platforms. The inherent stability of AUVs makes them ideal for the acquisition of orientation-dependent data. Marine geophysical applications that can benefit from AUV deployed sensors include vector magnetometry and magnetic gradiometry. These techniques are routinely used in scientific research and oil exploration. In the last decades, following pioneer work at Woods-Hole Oceanographic Institution, near-bottom surveys in deep waters, including magnetic surveys that traditionally were performed with underwater towed vehicles, started to be executed by AUVs. In the near future, motivated by the increasing investment of the oil industry in deep water surveying for oil exploration and the flurry of scientific activity in the study of deep ocean habitats and the deployment of underwater laboratories, we expect to witness a surge of interest in AUVs instrumented for geophysical exploration.
Conventional AUV navigation methods rely on inertial navigation systems (INS) or acoustic baselines. High-performance INS are overly expensive units which are unaffordable to the majority of scientific and commercial applications. Medium and long baseline systems required by the aforementioned applications are cumbersome to deploy and pose additional problems in terms of calibration and maintenance that increase significantly the complexity of the navigation systems and the costs of operation. Geophysical Navigation (GN) is an alternative, economical approach that relies on matching the geophysical data acquired by a vehicle with pre-existent maps of the area to be surveyed. This method is particularly well suited for the navigation of autonomous vehicles in areas that need to be surveyed repeatedly since the cost of acquiring the prior maps is diluted along time. Previous work by the proponents of this project and other researchers has shown the potential of geophysical navigation based on sonar and magnetic data to implement autonomous underwater navigation.
Reportedly, some advanced naval systems employ measurements of geopotential fields (including gravity and geomagnetism) as navigation aids. It is known that geophysical navigation technologies have been applied on military submarines as a mean of compensating the drifts inherent to INS systems. Sonar bathymetric fix capabilities have been integrated in US Navy submarines for decades. Given the potential of their application in advanced weapon systems, in-depth studies involving these technologies remain withheld from general circulation for reasons of national security. To the best of our knowledge there is no current implementation of geophysical navigation systems for routine operations in civilian applications.
Motivated by the above open issues and borrowing from the previous experience of the research team, we propose in the current project to study, develop, and validate a number of geophysical navigation techniques experimentally. The project combines fundamental research with practical applications and is expected to foster the application of GN methods to small AUVs, thus contributing to making them affordable and bringing their potential to bear on the execution of challenging scientific and commercial applications.
- The Project